
























2 Installation and commissioning
2.2.1. Pre-installation procedure
39
3HAC022032-001 Revision: E
© Copyri
ght
200
4-2008 ABB.
All rights reserved.
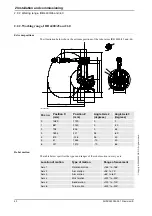
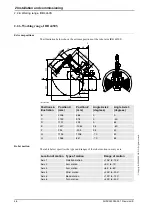
Loads on foundation, robot - all versions except IRB 4400/S and 4450S
The table below shows the various forces and torques working on the robot during different
kinds of operation. Stress forces for the robot versions IRB 4400/S and IRB 4450S are
detailed separately in the following tables.
Note! These forces and torques are extreme values that are rarely encountered during
operation. The values also never reach their maximum at the same time!
The rigidity of the foundation must be designed to minimize the affects of dynamic behaviour
on the robot. For optimal performance, the frequency for the foundation bearing the robot
must be higher than 30 Hz.
TuneServo can be used to adapt robot tuning for a non-optimal foundation.
Fxy and Mxy are vectors that can have any direction on the xy plane.
The illustration below shows the directions of the stress forces.
xx0300000254
Force
Endurance load (in operation)
Max. load (emergency stop)
Force xy
± 7500 N
± 9000 N
Force z
+9500 ± 2000 N
+9500 ± 3000 N
Torque xy
± 14000 Nm
± 16000 Nm
Torque z
± 2000 Nm
± 4000 Nm
Continued
Continues on next page
Summary of Contents for IRB 4400 - 45
Page 2: ......
Page 8: ...Table of Contents 6 3HAC022032 001 Revision E Copyright 2004 2008 ABB All rights reserved ...
Page 296: ......
Page 297: ... Copyright 2004 2006 ABB All rights reserved Foldout 1 ...
Page 298: ... Copyright 2004 2006 ABB All rights reserved Foldout 2 ...
Page 299: ... Copyright 2004 2006 ABB All rights reserved Foldout 3 1 ...
Page 301: ... Copyright 2004 2006 ABB All rights reserved Foldout 4 ...
Page 302: ... Copyright 2004 2006 ABB All rights reserved Foldout 5 ...
Page 303: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 1 ...
Page 304: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 2 ...
Page 305: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 3 ...
Page 307: ... Copyright 2004 2006 ABB All rights reserved Foldout 8 ...
Page 313: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 1 3 Sheet 103 ...
Page 314: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 1 3 Sheet 104 ...
Page 315: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 4 6 Sheet 105 ...
Page 316: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 4 6 Sheet 106 ...
Page 317: ... Copyright 2004 2006 ABB All rights reserved Customer Connection Sheet 107 ...
Page 318: ... Copyright 2004 2006 ABB All rights reserved Pos Indicator Axis 1 Option Sheet 108 ...
Page 321: ......



































































