





























Information
Action
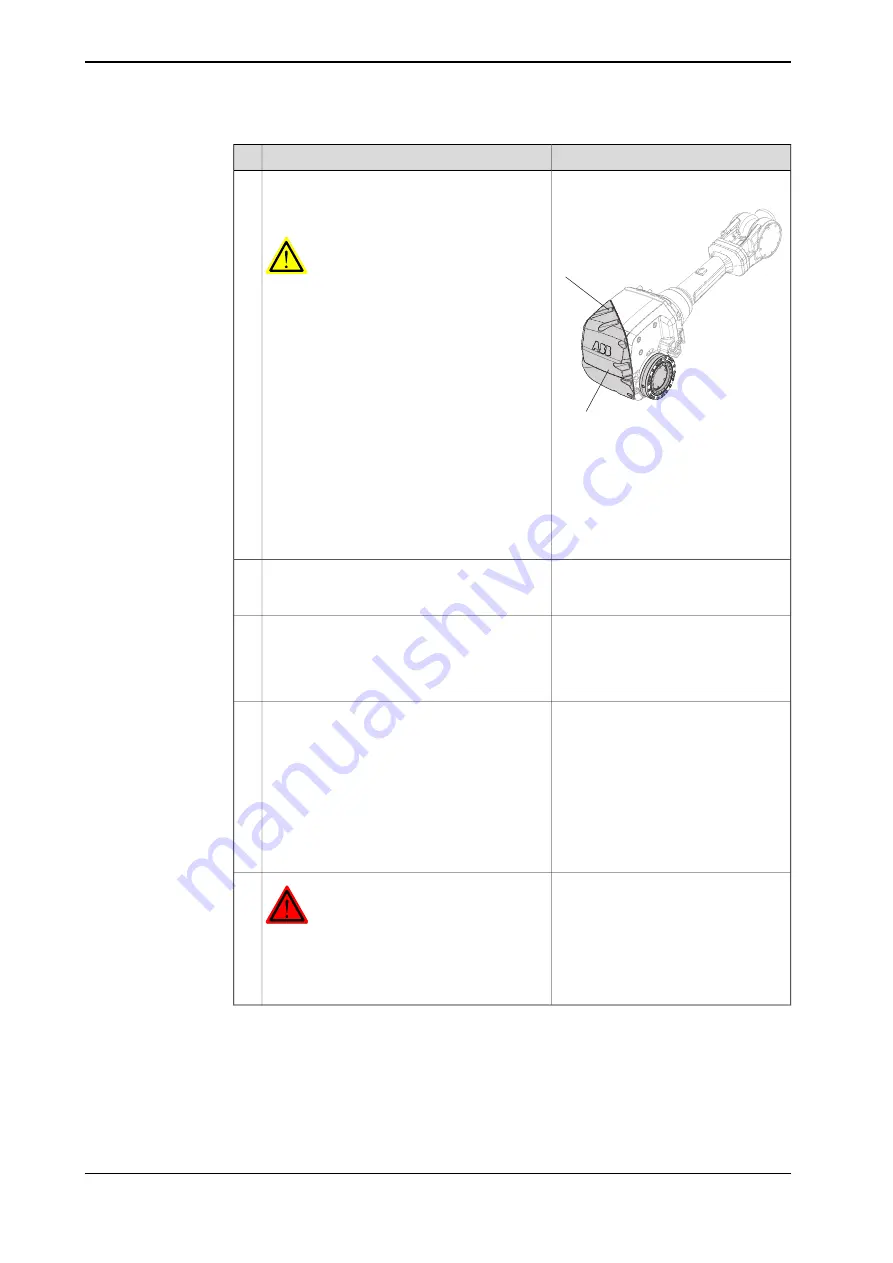
Make sure that the cover is tightly
sealed.
A
B
xx0800000389
Applicable to motors axes 3, 4, 5 and 6!
Refit the cover in the back of the armhouse
with its attachment screws and washers.
WARNING
The cover on the armhouse must be fitted when
the robot is running. It is a vital part for the
stability of the robot.
19
Parts:
•
A: Cover
•
B: Attachment screws M6x25,
quality 8.8-A2F (10 pcs)
Tightening torque:
•
14 Nm
Make sure that the armhouse cover is tightly
fitted. If there is a gap between the cover and
the robot, seal with Sikaflex 521 FC.
20
Seal and paint the joints that have been
opened. Also repair possible damages of the
special Foundry Prime paint coat of the robot.
See
Cut the paint or surface on the robot before
.
21
Pendulum Calibration is described in
Operating manual - Calibration Pendu-
lum
, enclosed with the calibration
tools.
Recalibrate the robot.
22
Axis Calibration is described in
rating with Axis Calibration method on
page 364
.
General calibration information is in-
cluded in section
.
DANGER
Make sure all safety requirements are met
when performing the first test run. These are
further detailed in the section
cause injury or damage on page 26
23
324
Product manual - IRB 4600 Foundry Prime
3HAC040585-001 Revision: M
© Copyright 2013-2018 ABB. All rights reserved.
4 Repair
4.7.2 Refitting motors
Continued
Summary of Contents for IRB 4600 Foundry Prime
Page 1: ...ROBOTICS Product manual IRB 4600 Foundry Prime ...
Page 106: ...This page is intentionally left blank ...
Page 194: ...This page is intentionally left blank ...
Page 398: ...This page is intentionally left blank ...
Page 400: ...This page is intentionally left blank ...
Page 406: ......
Page 407: ......







































































