





























4.7.2 Replacing the gearbox, axes 2- 3
Location of gearbox, axes 2-3
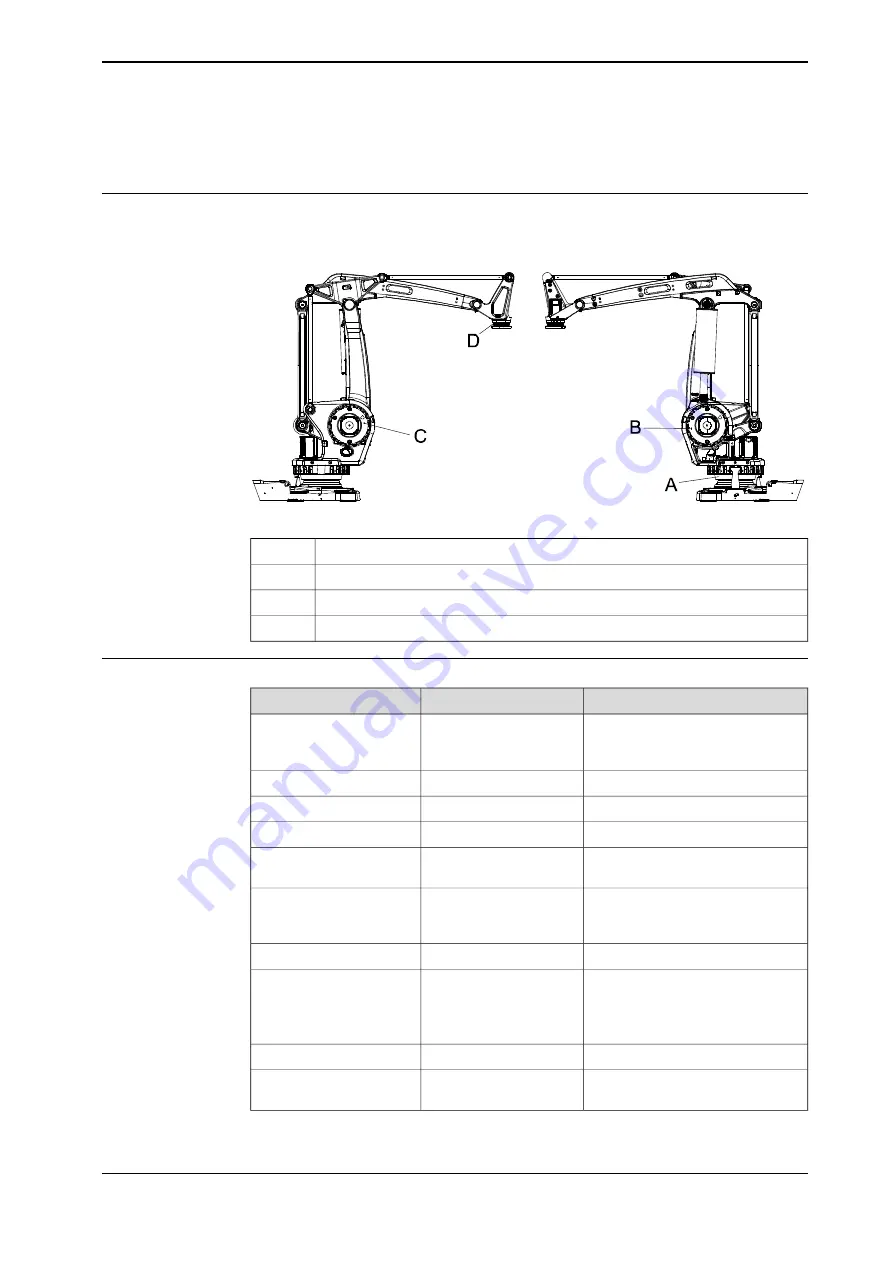
The axis-2 and axis-3 gearboxes are located on either side of the frame as shown
in the figure.
xx0500002467
Gearbox, axis 1
A
Gearbox, axis 2
B
Gearbox, axis 3
C
Gearbox, axis 6
D
Required equipment
Note
Art.no
Equipment, etc.
For spare part no. see:
•
Gearbox, axes 2-3
Always replace.
3HAC022379-001
Sealing axes 2-3
Replace if damaged.
3HAB3772-127
O-ring
Use to lock the lower arm.
-
Lock screw M16x55
2 pcs. Use to unload the balancing
device.
-
Screw M12x50
2 pcs, must have full thread. Use to
press the gearbox free from the
frame.
-
Screw M12x100
Use guide pins in pairs.
-
Guide pins M12
Roundsling and a rotating lifting
point.
-
Lifting accessory
Lifting capacity: 100 kg. Used to lift
the gearbox.
Use to keep the sealing in place.
3HAC14628-1/2
Guide sleeves
Use to lubricate surfaces on the
gearbox for easier assembly.
Grease
Continues on next page
Product manual - IRB 660
287
3HAC025755-001 Revision: W
© Copyright 2006-2020 ABB. All rights reserved.
4 Repair
4.7.2 Replacing the gearbox, axes 2- 3
Summary of Contents for IRB 660
Page 1: ...ROBOTICS Product manual IRB 660 ...
Page 8: ...This page is intentionally left blank ...
Page 332: ...This page is intentionally left blank ...
Page 352: ...This page is intentionally left blank ...
Page 354: ...This page is intentionally left blank ...
Page 360: ......
Page 361: ......







































































