























2.3.4 Manually releasing the brakes
Introduction to manually releasing the brakes
This section describes how to release the holding brakes for the motors of each
axis.
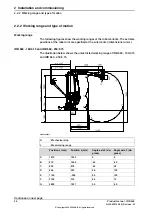
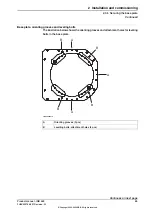
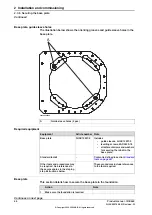
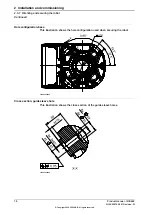
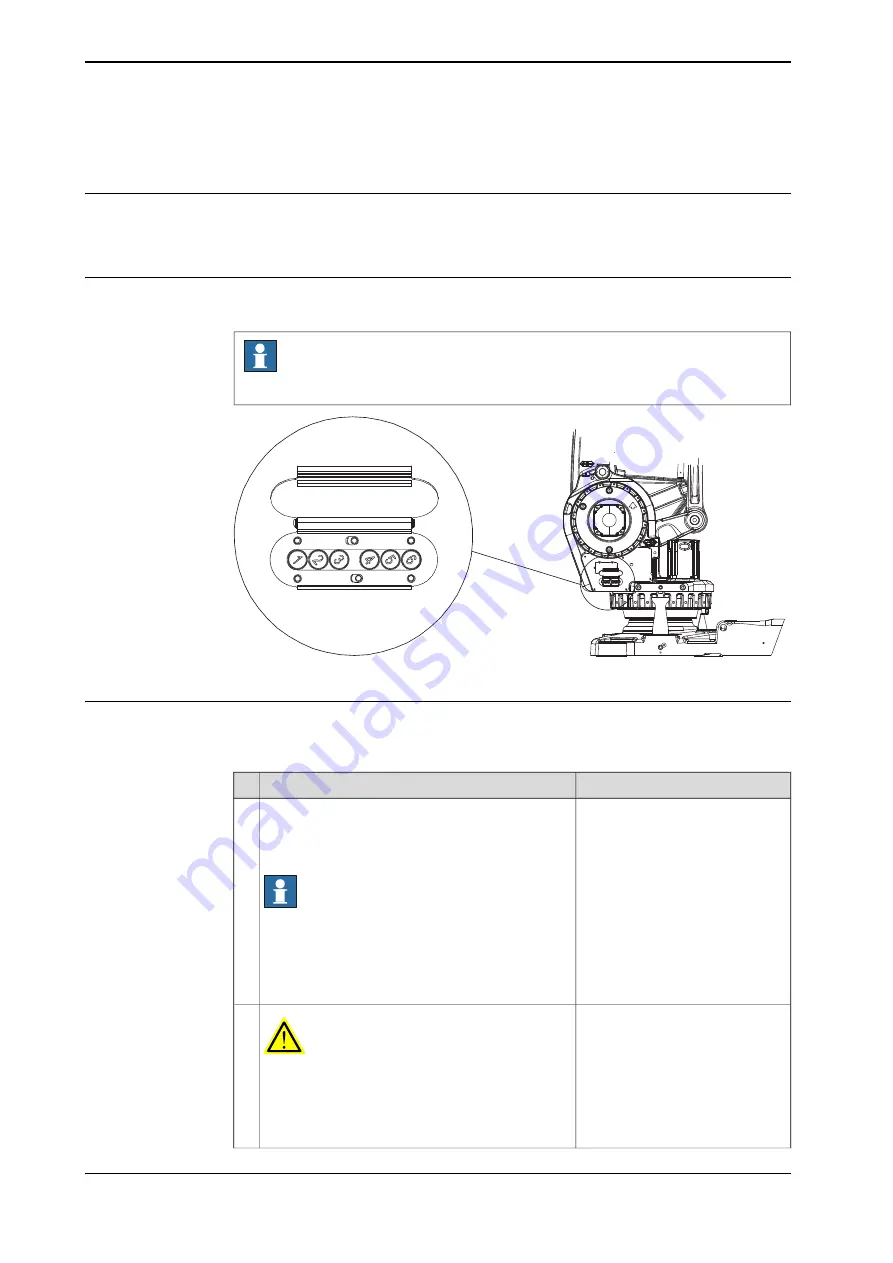
Location of brake release unit
The internal brake release unit is located as shown in the figure.
Note
Axes 4 and 5 do not exist!
xx0500002286
Releasing the brakes
This procedure details how to release the holding brakes when the robot is equipped
with an internal brake release unit.
Note
Action
Buttons are shown in figure
tion of brake release unit on
page 60
The internal brake release unit is equipped with
buttons for controlling the axes brakes. The buttons
are numbered according to the numbers of the
axes.
Note
Axes 4 and 5 do not exist!
1
If the robot is not connected to the controller, power
must be supplied to the connector R1.MP according
to the section
Supplying power to connector R1.MP
.
DANGER
When releasing the holding brakes, the robot axes
may move very quickly and sometimes in unexpec-
ted ways.
Make sure no personnel is near or beneath the ro-
bot.
2
Continues on next page
60
Product manual - IRB 660
3HAC025755-001 Revision: W
© Copyright 2006-2020 ABB. All rights reserved.
2 Installation and commissioning
2.3.4 Manually releasing the brakes
Summary of Contents for IRB 660
Page 1: ...ROBOTICS Product manual IRB 660 ...
Page 8: ...This page is intentionally left blank ...
Page 332: ...This page is intentionally left blank ...
Page 352: ...This page is intentionally left blank ...
Page 354: ...This page is intentionally left blank ...
Page 360: ......
Page 361: ......

































































