





























Note
Action
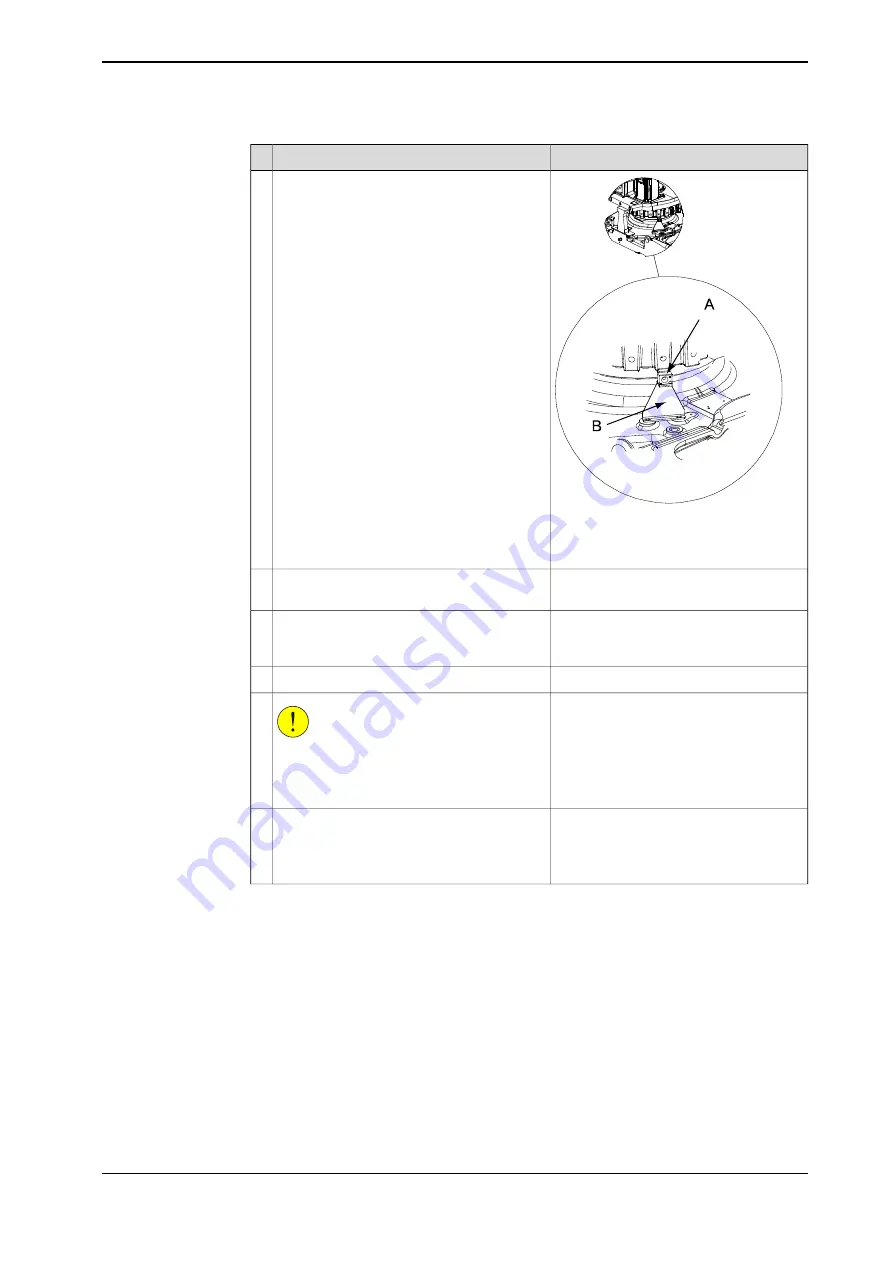
xx0600002734
A Block for calibration
B Calibration plate axis 1
Remove the
block for calibration
and the
axis
1 calibration plate
.
5
See
Changing oil, axis-1 gearbox on
.
Drain the axis 1 gearbox.
6
See
Replacing cable harness, lower end
Loosen the cable connectors from the base
and pull up the cabling from the base,
through the hole in the center of the frame.
7
See
Replacing motor, axis 1 on page 251
Remove the axis 1 motor.
8
CAUTION
The robot arm system weighs 245 kg.
All lifting accessories used must be sized
accordingly!
9
Make sure the lift is done completely
level.
Fit the lifting accessories and adjust it as
described in the enclosed user instructions.
10
This is detailed in section
with lifting slings on page 58
Continues on next page
Product manual - IRB 660
167
3HAC025755-001 Revision: W
© Copyright 2006-2020 ABB. All rights reserved.
4 Repair
4.3.3 Replacing the base, including axis 1 gearbox
Continued
Summary of Contents for IRB 660
Page 1: ...ROBOTICS Product manual IRB 660 ...
Page 8: ...This page is intentionally left blank ...
Page 332: ...This page is intentionally left blank ...
Page 352: ...This page is intentionally left blank ...
Page 354: ...This page is intentionally left blank ...
Page 360: ......
Page 361: ......































































