




























5.2 Synchronization marks and axis movement directions
5.2.1 Synchronization marks and synchronization position for axes
Introduction
This section shows the position of the synchronization marks and the
synchronization position for each axis.
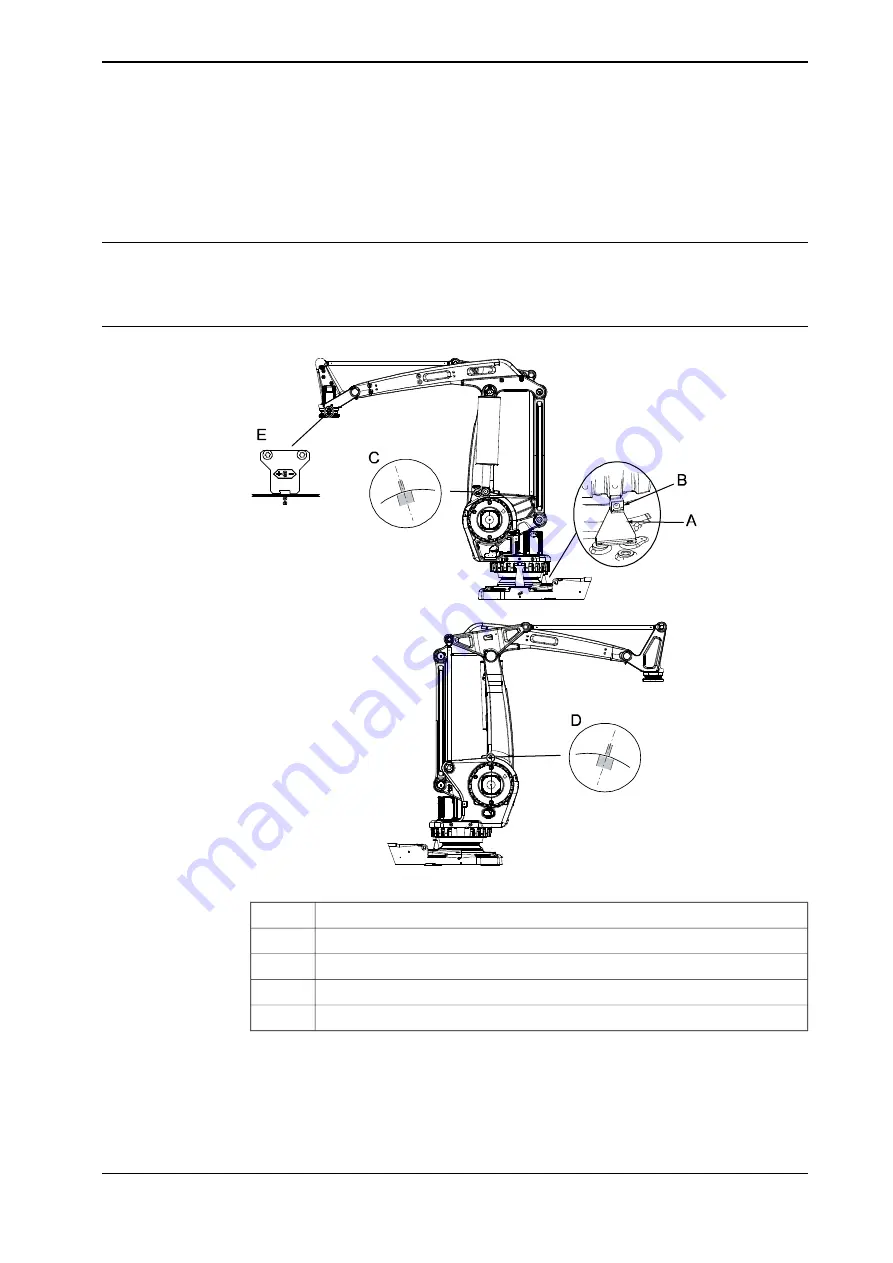
Synchronization marks, IRB 660
xx0500002487
Synchronization plate, axis 1
A
Synchronization tab on robot
B
Synchronization mark, axis 2
C
Synchronization mark, axis 3
D
Synchronization plate and mark, axis 6
E
Synchronization marks at axes 2 and 3
The synchronization marks at axes 2, 3 and 6, shown in the figure above, consist
of two single marks that should be positioned opposite to one another when the
robot is standing in its synchronization position. One of the marks is more narrow
than the other and should be positioned within the limits of the wider mark.
Product manual - IRB 660
309
3HAC025755-001 Revision: W
© Copyright 2006-2020 ABB. All rights reserved.
5 Calibration
5.2.1 Synchronization marks and synchronization position for axes
Summary of Contents for IRB 660
Page 1: ...ROBOTICS Product manual IRB 660 ...
Page 8: ...This page is intentionally left blank ...
Page 332: ...This page is intentionally left blank ...
Page 352: ...This page is intentionally left blank ...
Page 354: ...This page is intentionally left blank ...
Page 360: ......
Page 361: ......







































































