


























Lifting robot with fork lift
This section details how to secure the fork lift set to the robot in order to lift and
move the robot using the fork lift ONLY!
Note
Action
If a cooling fan for the axis 1 motor is used, it
must be removed in order to use the fork lift
device!
Release the brakes if required as de-
tailed in section
.
xx0500002275
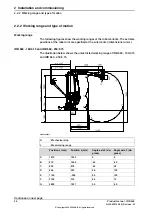
Position the robot as shown in the figure to the
right!
1
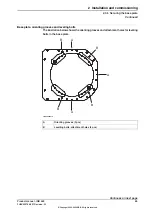
Attachment points are shown in figure
Attachment points on robot on page 50
Fit the two adapters to the robot and secure.
2
Attachment screws, 2 pcs, M16 x 90.
Tightening torque: 270 Nm.
xx0500002278
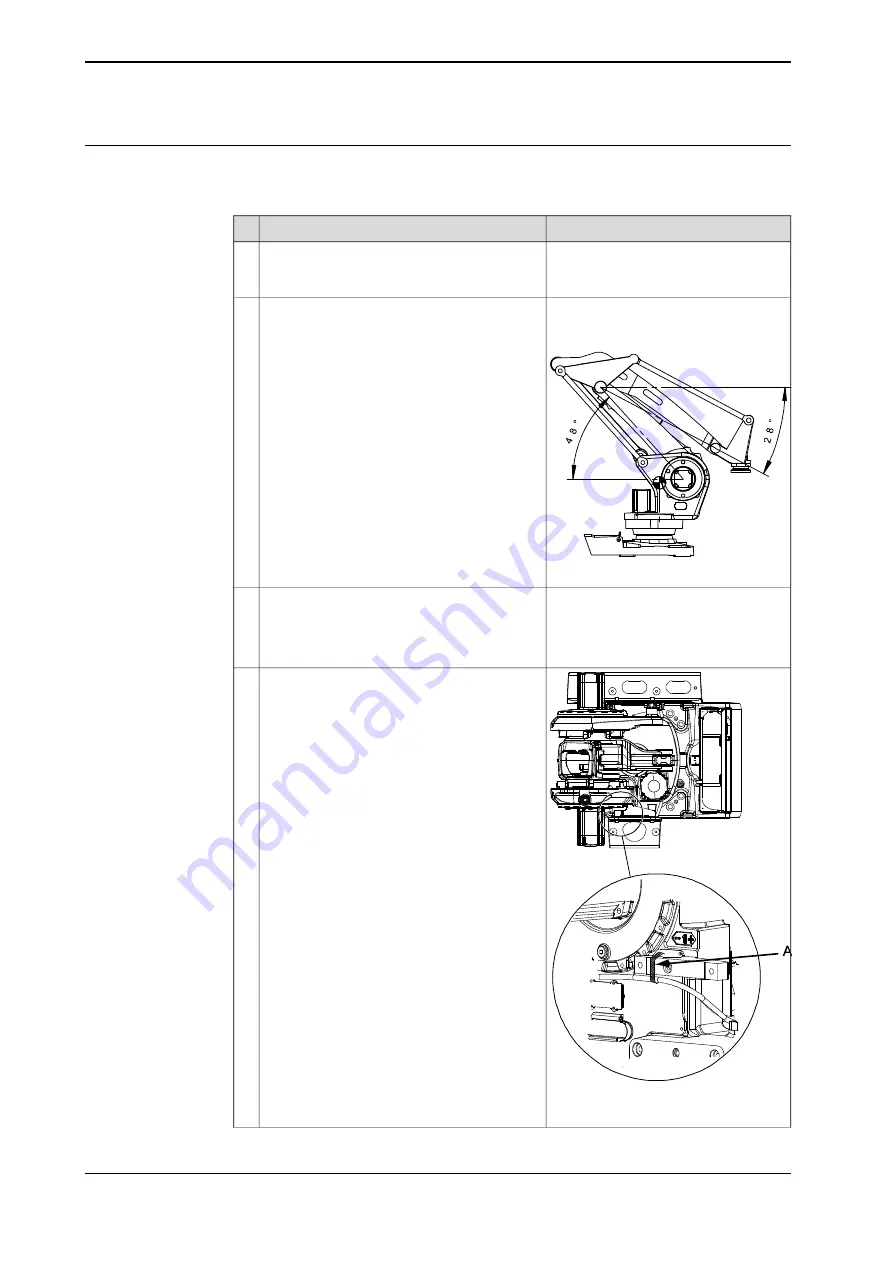
Strap up axis 2 motor cable on the adapter.
3
•
A: Strap, velcro
Continues on next page
52
Product manual - IRB 660
3HAC025755-001 Revision: W
© Copyright 2006-2020 ABB. All rights reserved.
2 Installation and commissioning
2.3.1 Lifting robot with fork lift
Continued
Summary of Contents for IRB 660
Page 1: ...ROBOTICS Product manual IRB 660 ...
Page 8: ...This page is intentionally left blank ...
Page 332: ...This page is intentionally left blank ...
Page 352: ...This page is intentionally left blank ...
Page 354: ...This page is intentionally left blank ...
Page 360: ......
Page 361: ......






























































