





























4 Repair
4.3.4. Replacement of cable harness, axes 5-6, IRB 6600ID and IRB 6650ID
3HAC023082-001 Revision: E
256
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
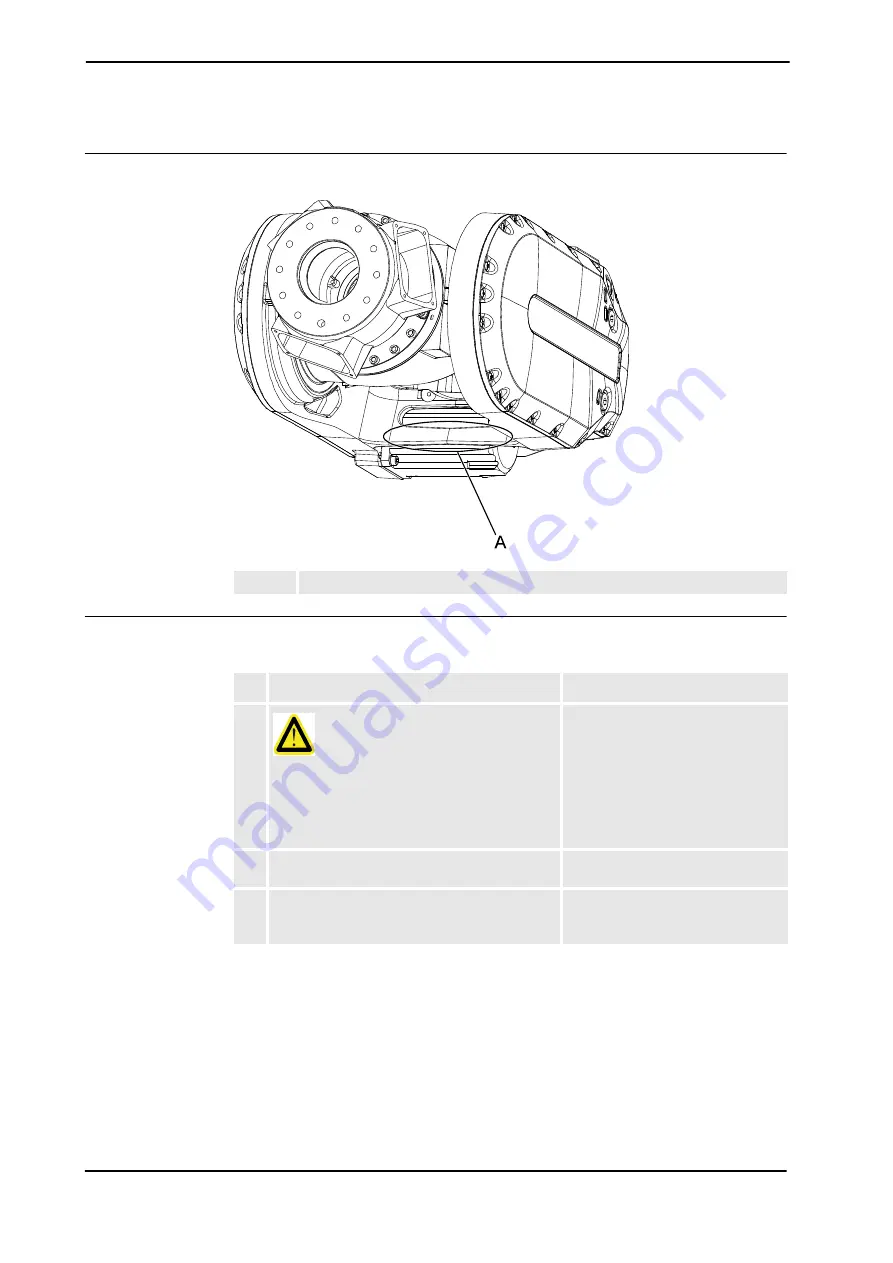
Cable layout, wrist unit
The figure below shows how to run and attach the cabling inside the wrist unit.
xx0500002014
Refitting, cable harness axes 5-6
The procedure below details how to refit the cable harness to the upper arm.
A
Location inside the wrist unit where to strap the cabling, next to the axis 5 motor.
Action
Note/Illustration
1.
DANGER!
Turn off all electric power, hydraulic and
pneumatic pressure supplies to the robot!
For Foundry Prime robots: Do not turn off the air
pressure to motors and SMB.
2. Make sure all the cable clamps and brackets are
attached properly to the new
cable harness
.
Spare part no. is specified in
Required equipment on page 253
3. Insert the cable harness through the upper arm
tube and pull out the motor connectors at the
wrist unit.
Continued
Continues on next page
Summary of Contents for IRB 6600 - 175/2.8 type B
Page 2: ......
Page 10: ...Table of Contents 8 3HAC023082 001 Revision E Copyright 2004 2008 ABB All rights reserved ...
Page 532: ......







































































