





























2 Installation and commissioning
2.5.1. Lifting robot with fork lift
63
3HAC023082-001 Revision: E
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
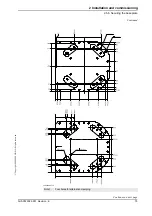
Lifting the robot with fork lift
The section below details how to secure the fork lift set to the robot in order to lift and move
the robot using the fork lift ONLY!
Action
Note/Illustration
1. If a cooling fan for the axis 1 motor is used, it
must be removed in order to use the fork lift
device!
2. Position the robot as shown in the figure to the
right!
Release the brakes if required as
detailed in section
xx0200000387
3. Fit the two
spacers
to the robot and secure.
Attachment points on the robot are
shown in the figure
.
4.
CAUTION!
The fork lift pocket weighs 60 kg!
5. Secure the longer
fork lift pocket
to the spacers
with four of the
horizontal attachment screws
and washers.
Note!
The vertically and the horizontally
attached screws are identical, but tightened
with different torques!
Make sure the original screws are
always used (or replacements of
equivalent quality: M16, quality 12.9)!
Attachment points on the robot are
shown in the figure
.
xx0400001068
•
A: horizontal attachment
screws, 4 pcs, M16 x 60.
Tightening torque: 60 Nm.
•
B: spacers, 2 pcs.
Continued
Continues on next page
Summary of Contents for IRB 6600 - 175/2.8 type B
Page 2: ......
Page 10: ...Table of Contents 8 3HAC023082 001 Revision E Copyright 2004 2008 ABB All rights reserved ...
Page 532: ......


































































