




























2 Installation and commissioning
2.5.4. Manually releasing the brakes
3HAC023082-001 Revision: E
72
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
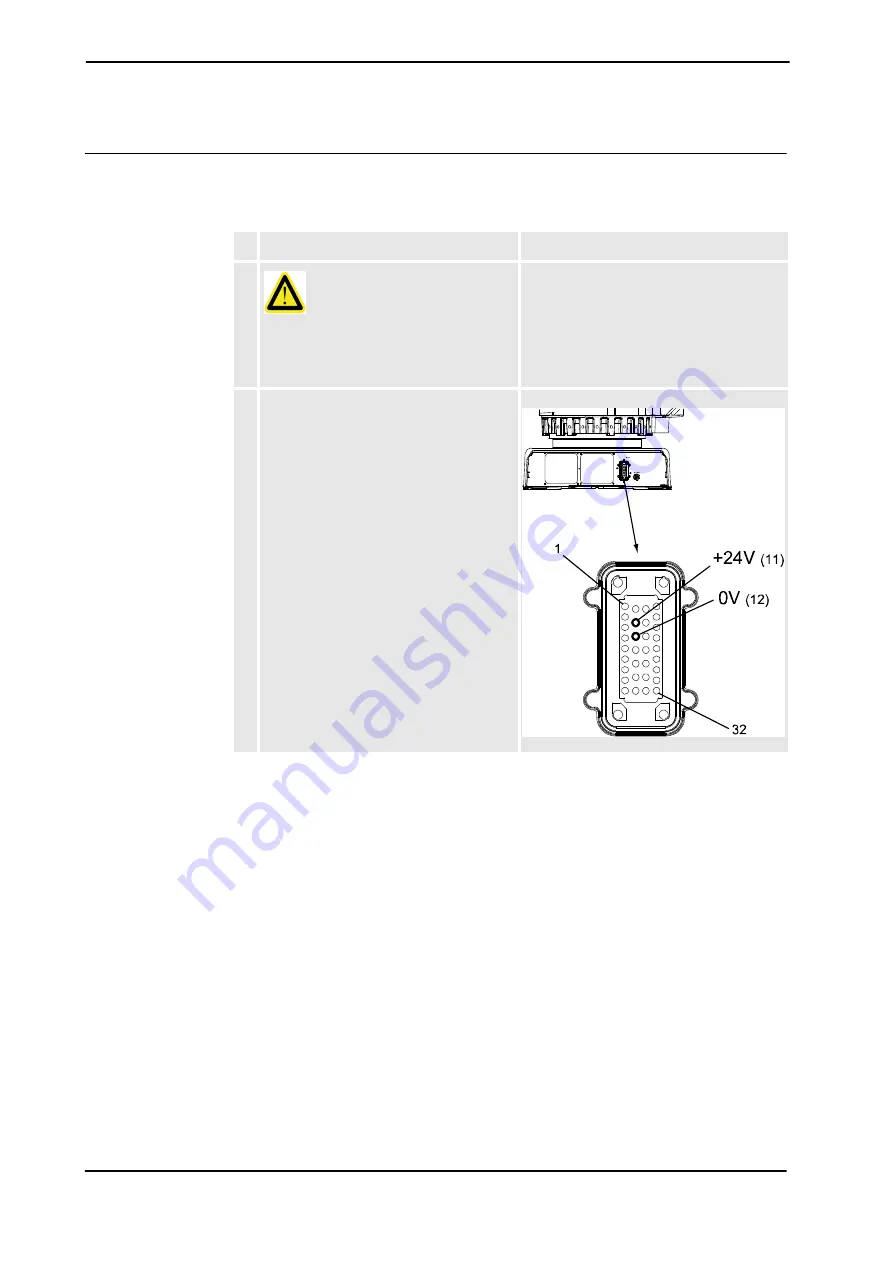
Supplying power to connector R1.MP
If the robot is not connected to the controller, power must be supplied to connector R1.MP in
the robot base in order to enable the brake release buttons on the robot.
Action
Note/Illustration
1.
DANGER!
Incorrect connections, such as supplying
power to the wrong pin, may cause all
brakes to be released simultaneously!
2. Supply 0V on pin 12 and 24V on pin 11.
xx0300000565
Continued
Summary of Contents for IRB 6600 - 175/2.8 type B
Page 2: ......
Page 10: ...Table of Contents 8 3HAC023082 001 Revision E Copyright 2004 2008 ABB All rights reserved ...
Page 532: ......







































































