





























2 Installation and commissioning
2.5.9. Installation of chip and dust protection (option)
89
3HAC023082-001 Revision: E
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
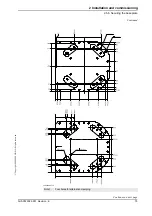
2. Remove the four attachment screws (A)
from the cover, axis 2.
Use the holes to attach the bearing as
described in next step.
xx0400001103
3. Attach the
bearing unit, axis 2 motor
to
the robot with the enclosed attachment
screws.
Make sure the bearing unit is orientated
correctly. The opening must be
orientated approximately as shown in
the figure to the right (B).
xx0400001079
Attachment screws: 4 pcs, M8 x 40.
Tightening torque: 24 Nm.
4. Remove the securing screws that are
fitted to the bearing unit during transport
and installation.
The separate rings are now movable.
xx0400001098
Action
Note/Illustration
Continued
Continues on next page
Summary of Contents for IRB 6600 - 175/2.8 type B
Page 2: ......
Page 10: ...Table of Contents 8 3HAC023082 001 Revision E Copyright 2004 2008 ABB All rights reserved ...
Page 532: ......







































































