





























4 Repair
4.3.3. Replacement of complete arm system
171
3HAC027151-001 Revision: B
©
Co
py
rig
h
t 200
6-
200
8 ABB. All righ
ts reser
v
ed.
3.
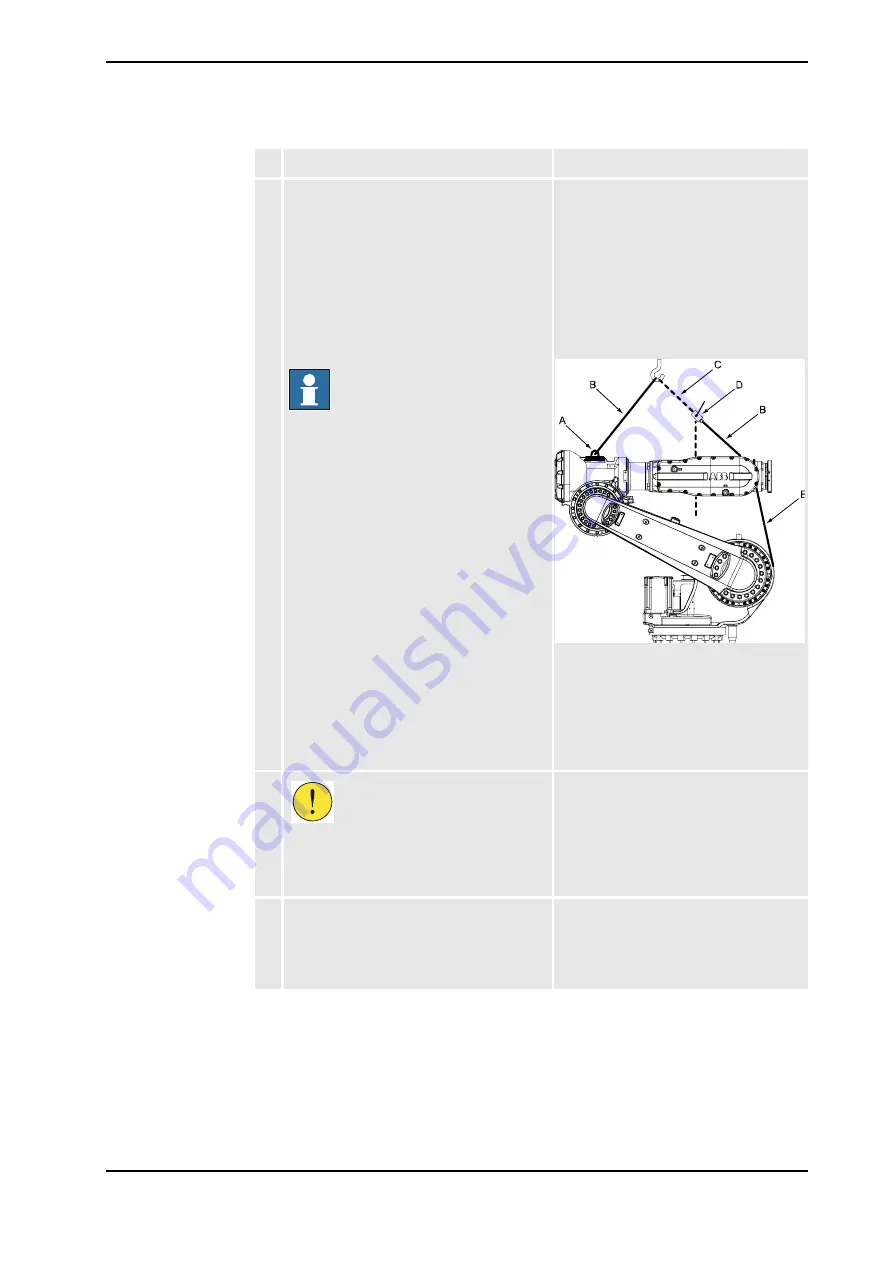
Alternate method
of lifting:
Fit the
lifting device
and a
roundsling
on the
upper arm
and
a
roundsling
with a hoisting
block, to the wrist unit.
Also fit a separate
roundsling
between the
wrist and the frame in order to eliminate any
load through the brake on motor axis 3.
The hoisting block is used to balance the
upper arm.
See the
lifting instructions
.
NOTE!
The brake on axis 3 shall be released during
the lift, until the roundsling between the wrist
and the frame tranfers the load of the frame.
See figure to the right!
Make sure the lift is done completely
level! How to adjust the lift is described in
the enclosed instruction to the lifting
device!
Follow the instructions before
lifting!
Releasing the brakes is detailed in section
Manually releasing the brakes on page
61
.
xx0600003100
•
A : Lifting tool
•
B : Roundsling
•
C : Lifting chain
•
D : Hoisting block
•
E : Roundsling (used to transfer
the load of the frame)
4.
CAUTION!
The complete arm system weighs 590 kg! All
lifting equipment used must be sized accord-
ingly!
5. Lift the complete arm system and move it at
very low speed, making sure it does not tip!
Make sure the lift is done completely level.
Adjust the length of the chains as detailed in
enclosed instruction or with a hoisting block.
Make sure all the hooks and attachments
stay in the correct position while lifting the
robot!
Action
Note
Continued
Continues on next page


































































