





























4 Repair
4.7.2. Replacement gearbox axis 2
239
3HAC027151-001 Revision: B
©
Co
py
rig
h
t 200
6-
200
8 ABB. All righ
ts reser
v
ed.
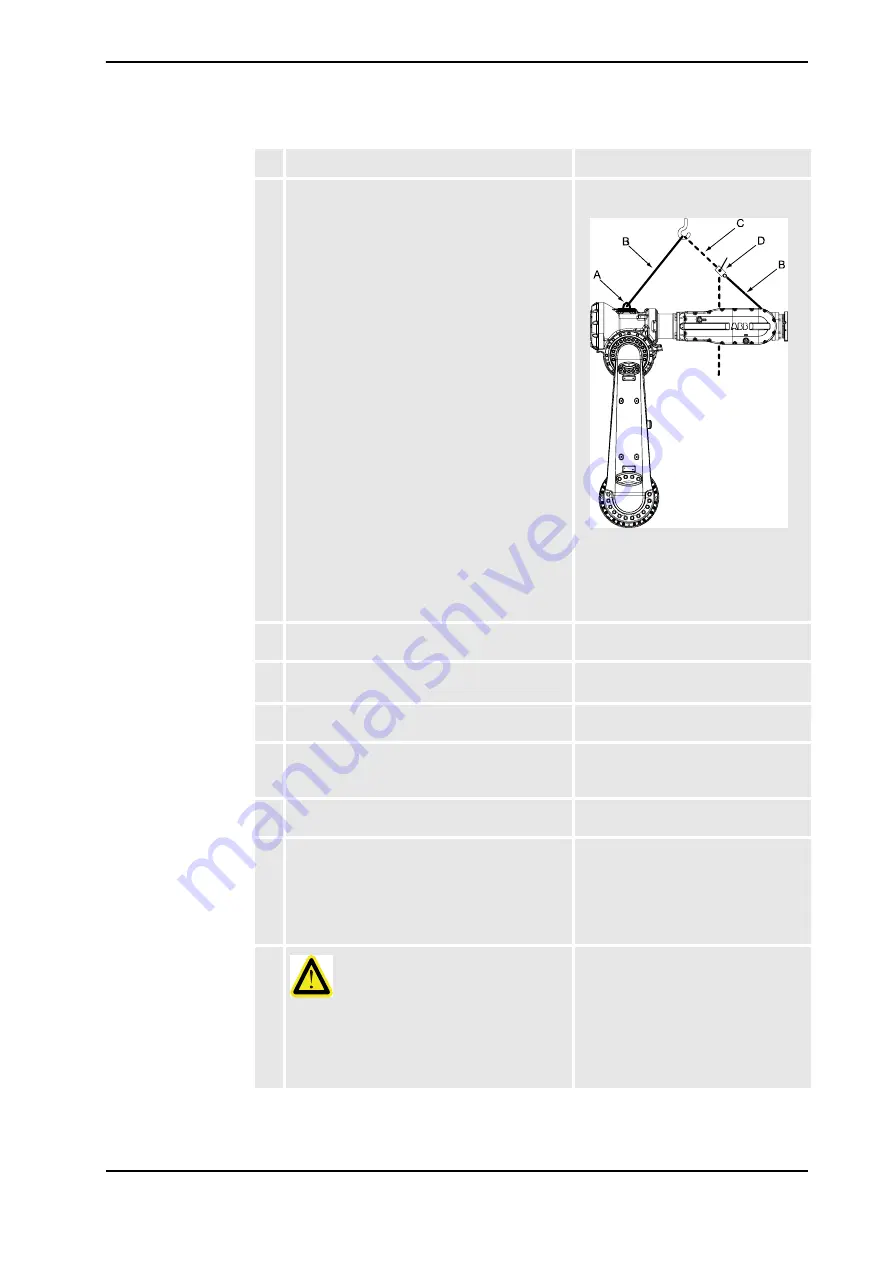
8. Fit the
lifting tool
on the upper arm and secure
the robot in an overhead crane and lift it
carefully up to its mounting position.
Art. no. is specified in
xx0600003099
•
A : Lifting tool
•
B : Roundsling
•
C : Lifting chain
•
D : Hoisting block
9. Use a crank in the gearbox in order to find the
holes for the attachment screws.
10. Refit the lower arm to the gearbox axis 2 with its
attachment screws.
M16x50 (16 pcs)
Tightening torque: 300 Nm.
11. Refit motor axis 2.
Detailed in section
.
12. Refit the cable harness, axes 1-3.
Detailed in section
cable harness, lower end (axes 1-2) on
page 153
.
13. Fill the gearbox axis 2 with oil.
Detailed in section
.
14. Recalibrate the robot.
Calibration is detailed in a separate
calibration manual, enclosed with the
calibration tools.
General calibration information is
included in section
Calibration infor-
mation
.
15.
DANGER!
Make sure all safety requirements are met
when performing the first test run. These are
further detailed in section
run may cause injury or damage! on page 33
Action
Note
Continued







































































