





























3 Maintenance
3.4.3. Oil change, gearbox axis 2
129
3HAC027151-001 Revision: B
©
Co
py
rig
h
t 200
6-
200
8 ABB. All righ
ts reser
v
ed.
3.4.3. Oil change, gearbox axis 2
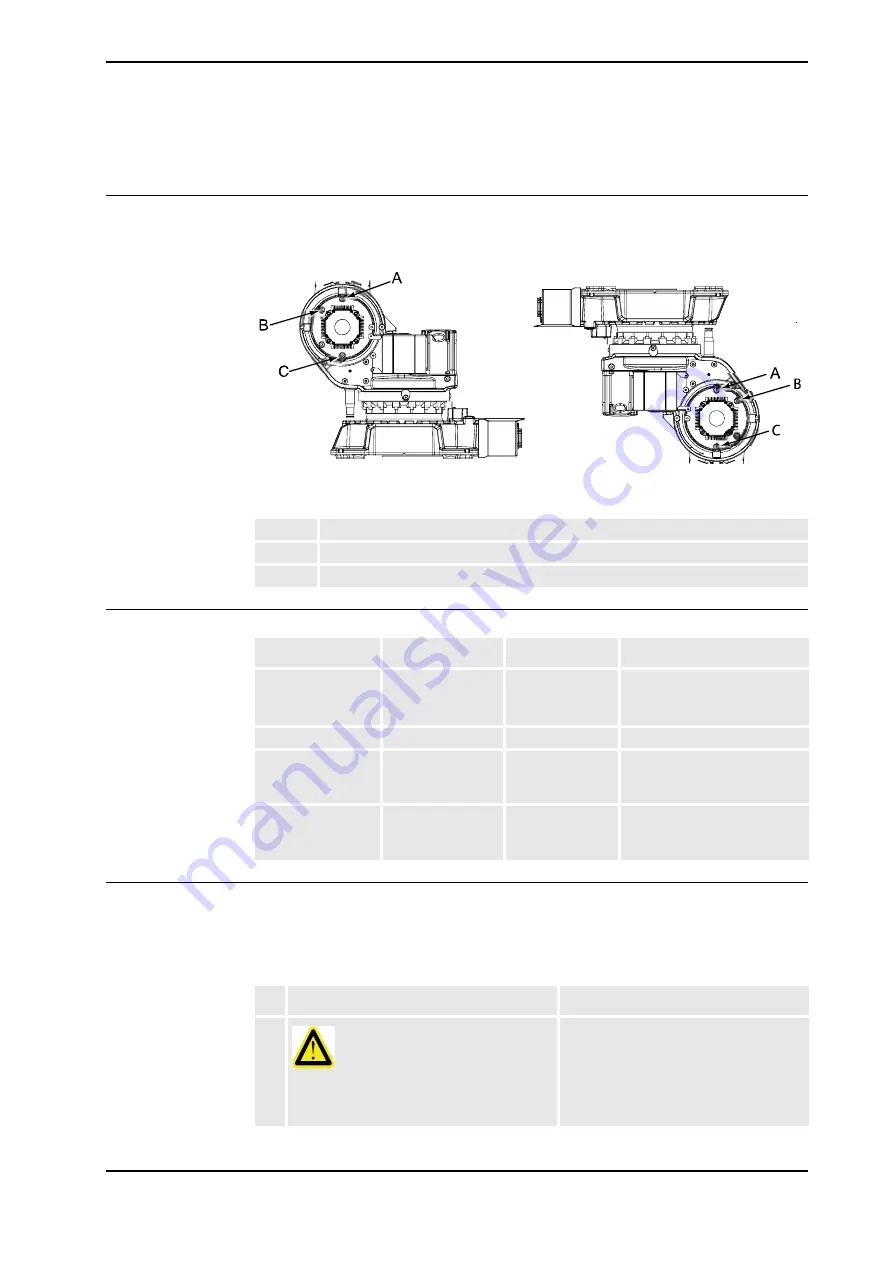
Location of oil plugs
The gearbox, axis 2, is located in the lower arm rotational center, underneath the motor
attachment.
xx0600002983
The figure shows both floor and suspended mounted robot.
Note
that the holes are used
differently depending on how the robot is mounted!
Required equipment
Draining, oil
The procedure below details how to drain the oil in gearbox axis 2.
When using the oil exchange equipment, follow the instructions enclosed with the kit. Art.
no. for the kit is specified in
Required equipment on page 129
A
Oil plug, filling
B
Oil plug, inspection
C
Oil plug, draining
Equipment, etc. Art. no.
Amount
Note
Lubricating oil
3HAC032140-001
4,100 ml
Kyodo Yushi TMO 150
Note!
Do not mix with other oil
types!
Oil collecting vessel -
Capacity: 5,000 ml.
Oil exchange
equipment
3HAC021745-001
The content is defined in
section
Standard toolkit
-
The content is defined in
section
.
Action
Note
1.
DANGER!
Turn off all electric power, hydraulic and
pneumatic pressure supplies to the robot!
Continues on next page



































































