





























4 Repair
4.3.3. Replacement of complete arm system
3HAC027151-001 Revision: B
166
©
Co
py
rig
h
t 200
6-
200
8 ABB. All righ
ts reser
v
ed.
4.3.3. Replacement of complete arm system
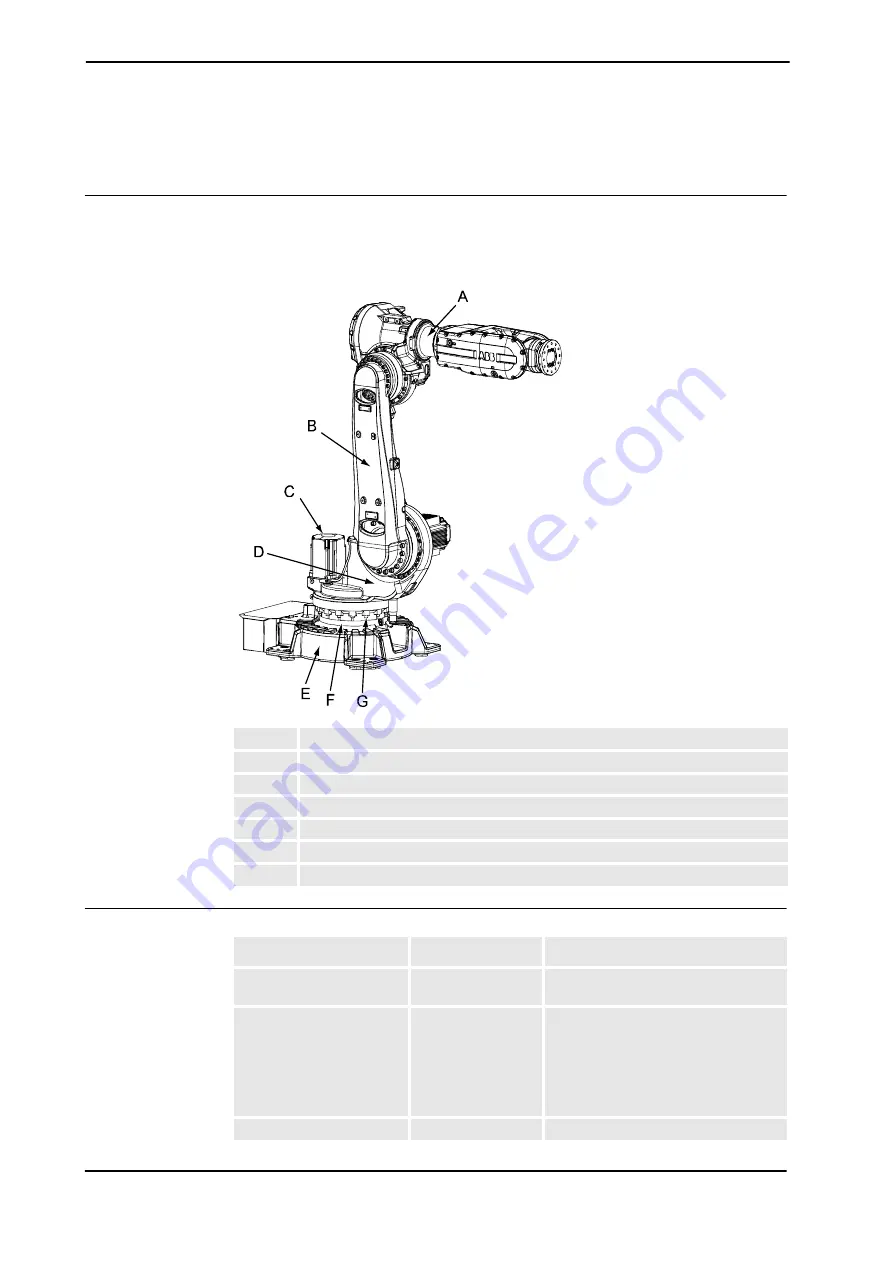
Location of arm system
The complete arm system is defined as the complete robot except for the base, motor and
gearbox axis 1. This is shown in the figure below.
A more detailed view of the component and its position may be found in chapter .
xx0600003035
Required equipment
A
Upper arm
B
Lower arm
C
Motor, axis 1
D
Frame
E
Base
F
Gearbox, axis 1
G
Attachment screws base M12x80, quality 12.9 Gleitmo (16 pcs)
Equipment, etc.
Art. no.
Note
Lifting device, robot
3HAC026597-001
Instruction 3HAC026600-002 is
enclosed!
Guide pins M12 x 130
3HAC022637-001
Used to guide the complete arm system
when refitting.
Always use the guide pins in pairs!
In order to make the refitting easier, it is
recommended to use two guide pins of
different lengths.
Roundslings
-
Continues on next page







































































