





























1 Description
1.3.3 Mounting the manipulator
3HAC 025861-001
Rev.E
17
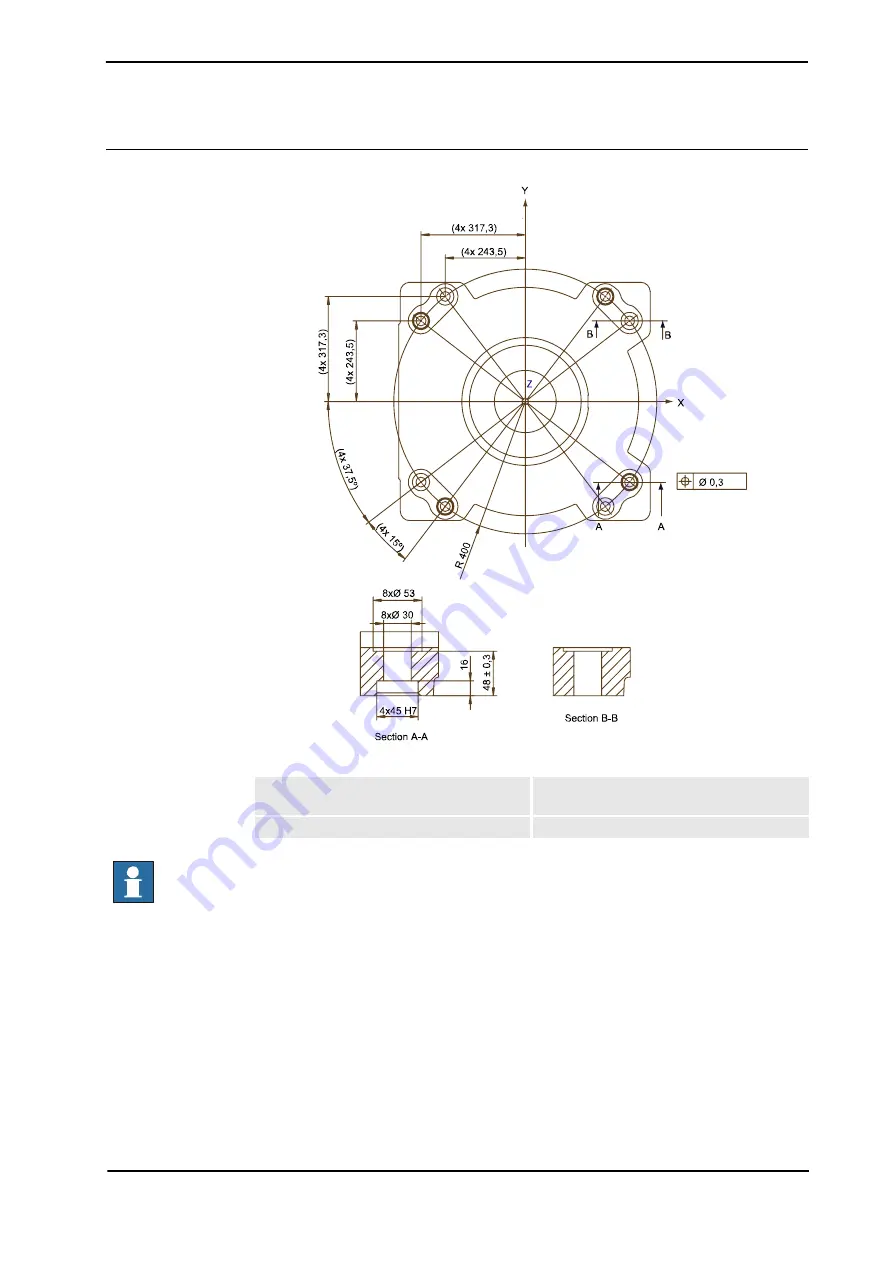
Fastening holes robot base
Figure 4 Hole configuration (dimensions in mm).
Recommended screws for fastening the
manipulator to the base
M24 x 100 8.8 with 4 mm flat washer
Torque value
775 Nm
Only two guiding sleeves shall be used. The corresponding holes in the base plate shall be
circular and oval according to Figure 5 and Figure 6.
Summary of Contents for IRB 6620
Page 1: ...Product specification Articulated robot IRB 6620 150 2 2 M2004...
Page 2: ......
Page 3: ...Product specification Articulated robot 3HAC025861 001 Rev E IRB 6620 150 2 2 M2004...
Page 116: ...2 DressPack and SpotPack 2 9 1 Options 114 Rev E 3HAC 025861 001...
Page 132: ...3 Specification of Variants and Options 3 1 14 Documentation 130 Rev E 3HAC 025861 001...
Page 134: ...4 Accessories 132 Rev E 3HAC 025861 001...
Page 137: ......


































































