





























Note
Action
DANGER
Turn off all:
•
electric power supply to the robot
•
hydraulic pressure supply to the ro-
bot
•
air pressure supply to the robot
Before entering the robot working area.
2
Detailed in the section
Drain the oil from gearbox axis 3.
3
Connect to connector R2.MP3:
•
+ : pin 2
•
-: pin 5
Raise the upper arm to a position where it
is parallel to the floor by releasing the brake
of the axis 3 motor.
In order to release the brake of the axis 3
motor, connect the 24 VDC power supply.
4
Note!
When releasing the brake, the posi-
tion of the upper arm can change suddenly!
Perform the procedure carefully!
CAUTION
The complete upper arm (incl. gearbox axis
3) weighs 282 kg without any additional
equipment fitted! Use a suitable lifting
device to avoid injury to personnel!
5
Art. no. is specified in
xx0600003102
Fit the
lifting tool
on the upper arm as de-
tailed in the enclosed instructions.
Also fit a
hoisting block
to the front which
is used to adjust the balance of the upper
arm in order to lift it completely level.
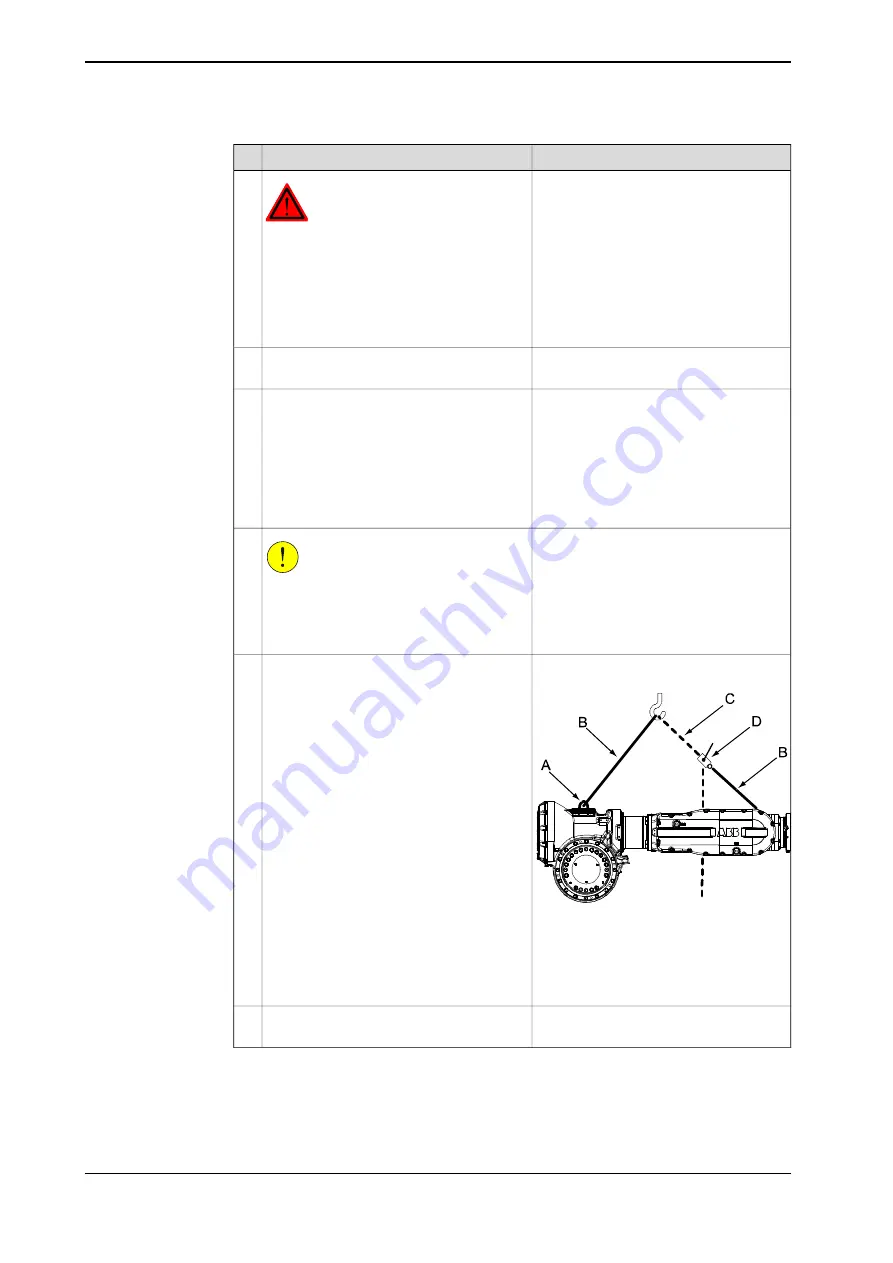
6
•
A : Lifting tool
•
B : Roundsling
•
C : Lifting chain
•
D : Hoisting block
Detailed in the section
cable harness, upper end on page 192
.
Remove the cable harness, axes 3-6.
7
Continues on next page
224
Product manual - IRB 6620
3HAC027151-001 Revision: T
© Copyright 2006-2018 ABB. All rights reserved.
4 Repair
4.4.3 Replacement of the upper arm
Continued
Summary of Contents for IRB 6620
Page 1: ...ROBOTICS Product manual IRB 6620 ...
Page 8: ...This page is intentionally left blank ...
Page 176: ...This page is intentionally left blank ...
Page 338: ...This page is intentionally left blank ...
Page 350: ...This page is intentionally left blank ...
Page 352: ...This page is intentionally left blank ...
Page 358: ......
Page 359: ......







































































