





























Note
Action
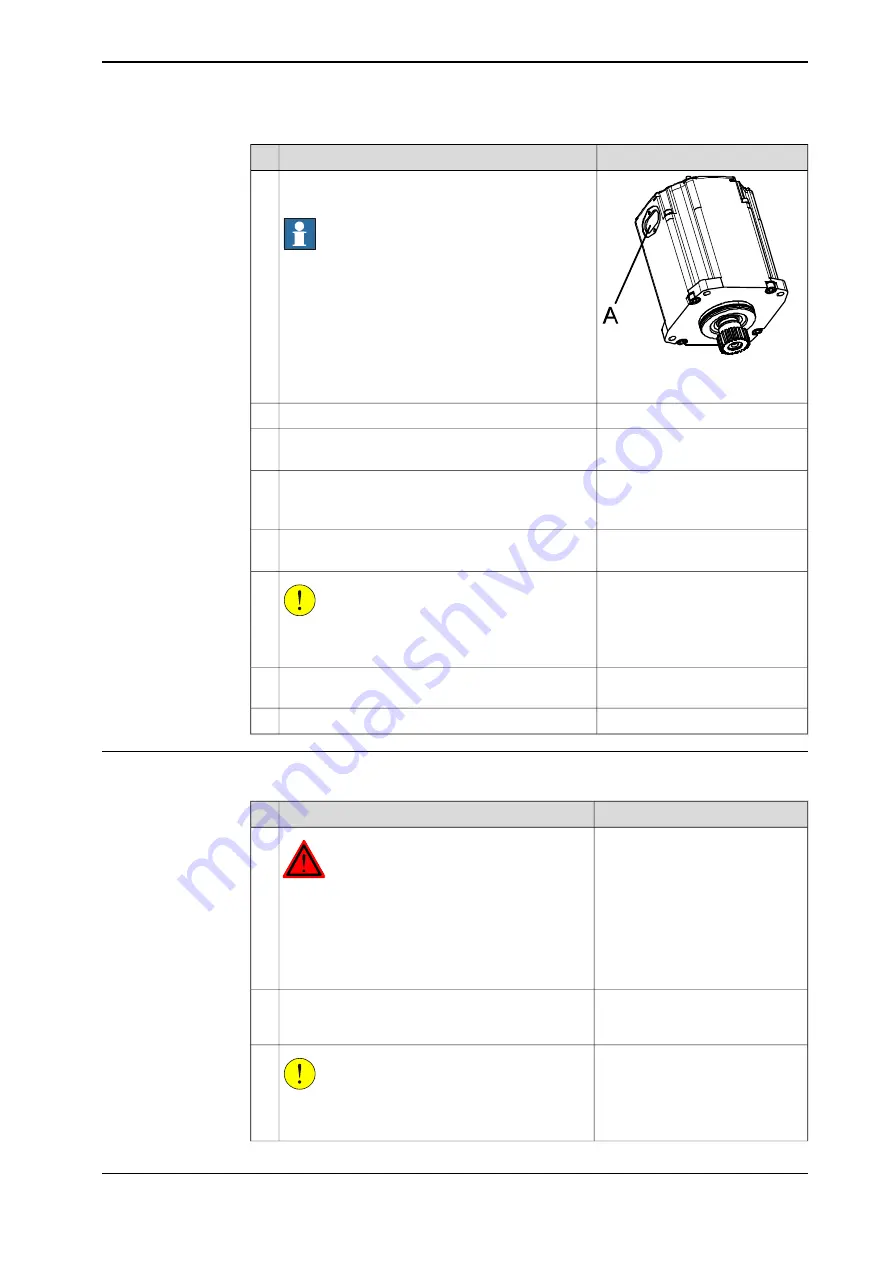
xx0200000199
Remove the cable gland cover at the cable exit by
unscrewing its two attachment screws.
Note
Make sure the gasket is not damaged!
4
•
A: Cable gland cover
Disconnect all connectors beneath the motor cover.
5
Art. no. is specified in
.
Apply
lifting tool, motor axis 1, 4, 5
to the motor.
6
Connect to connector R2.MP1
•
+: pin 2
•
-: pin 5
In order to release the brakes, connect the 24 VDC
power supply.
7
Shown in the figure
Remove the motor by unscrewing its four
attach-
ment screws
and plain washers.
8
CAUTION
The motor weighs 25 kg! All lifting equipment used
must be sized accordingly!
9
Lift the motor to get the pinion away from the gear
and disconnect the brake release voltage.
10
Remove the motor by gently lifting it straight up.
11
Refitting, motor axis 1
The procedure below details how to refit motor, axis 1.
Note
Action
DANGER
Turn off all:
•
electric power supply to the robot
•
hydraulic pressure supply to the robot
•
air pressure supply to the robot
Before entering the robot working area.
1
Art no. is specified in
.
Make sure the
o-ring
on the circumference of the
motor is seated properly. Lightly lubricate the o-
ring with
grease.
2
CAUTION
The motor weighs 25 kg! All lifting equipment used
must be sized accordingly!
3
Continues on next page
Product manual - IRB 6620
245
3HAC027151-001 Revision: T
© Copyright 2006-2018 ABB. All rights reserved.
4 Repair
4.6.1 Replacement of motor, axis 1
Continued
Summary of Contents for IRB 6620
Page 1: ...ROBOTICS Product manual IRB 6620 ...
Page 8: ...This page is intentionally left blank ...
Page 176: ...This page is intentionally left blank ...
Page 338: ...This page is intentionally left blank ...
Page 350: ...This page is intentionally left blank ...
Page 352: ...This page is intentionally left blank ...
Page 358: ......
Page 359: ......

































































