





























Note
Action
If the indicator moves towards red when jogging,
switch to the opposite direction to reach green
side.
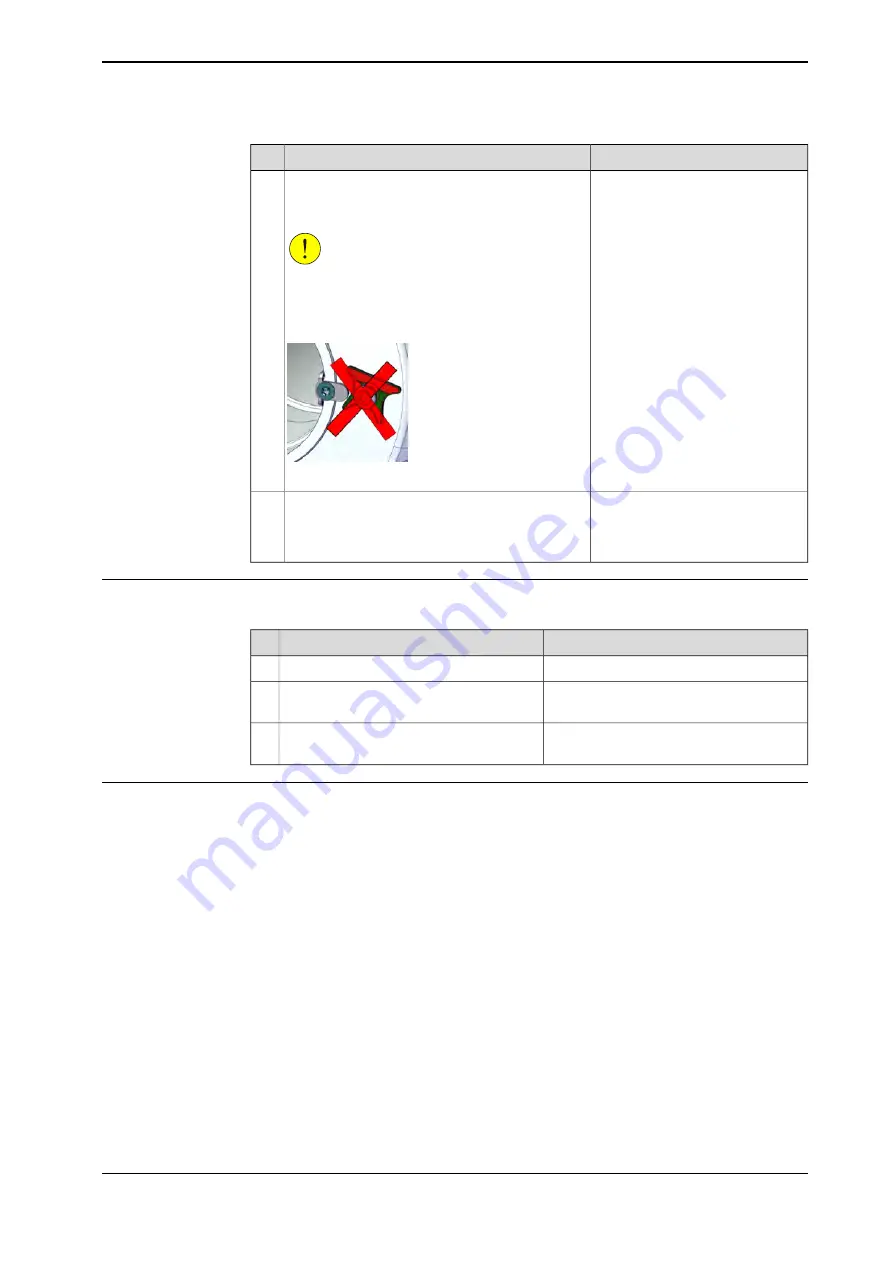
CAUTION
If axis 4 is turned too much, the red side of the
indicator will turn towards axis 4 and the cabling
may be damaged. Jog the robot in the opposite
direction.
xx1500002450
3
If the red side of the indicator points towards axis
4 centre, make a check that the motor cabling and
motor connectors are not damaged. Replace if
damaged.
4
Step 1 - Manually running the manipulator to the synchronization position
Use this procedure to manually run the manipulator to the synchronization position.
Note
Action
Select axis-by-axis motion mode.
1
See
Synchronization marks and synchron-
ization position for axes on page 310
Jog the manipulator to align the synchron-
ization marks.
2
Step 2 - Updating the revolution counter
with the FlexPendant on page 316
When all axes are positioned, update the
revolution counter.
3
Correct calibration position of axis 4 and 6
When jogging the manipulator to synchronization position, it is extremely important
to make sure that axes 4 and 6 of the following mentioned manipulators are
positioned correctly. The axes can be calibrated at the wrong turn, resulting in an
incorrect manipulator calibration.
Make sure the axes are positioned according to the correct calibration values, not
only according to the synchronization marks. The correct values are found on a
label, located either on the lower arm, underneath the flange plate on the base or
on the frame.
At delivery the manipulator is in the correct position, do NOT rotate axis 4 or 6 at
power up before the revolution counters are updated.
If one of the following mentioned axes are rotated one or more turns from its
calibration position before updating the revolution counter, the correct calibration
Continues on next page
Product manual - IRB 6620
315
3HAC027151-001 Revision: T
© Copyright 2006-2018 ABB. All rights reserved.
5 Calibration
5.3 Updating revolution counters
Continued
Summary of Contents for IRB 6620
Page 1: ...ROBOTICS Product manual IRB 6620 ...
Page 8: ...This page is intentionally left blank ...
Page 176: ...This page is intentionally left blank ...
Page 338: ...This page is intentionally left blank ...
Page 350: ...This page is intentionally left blank ...
Page 352: ...This page is intentionally left blank ...
Page 358: ......
Page 359: ......







































































