





























2.5.5 Lifting the base plate
Required equipment
Note
Article number
Equipment
3 pcs
3HAC14457-4
Lifting eye, M16
Length: approx. 2 m
Lifting slings
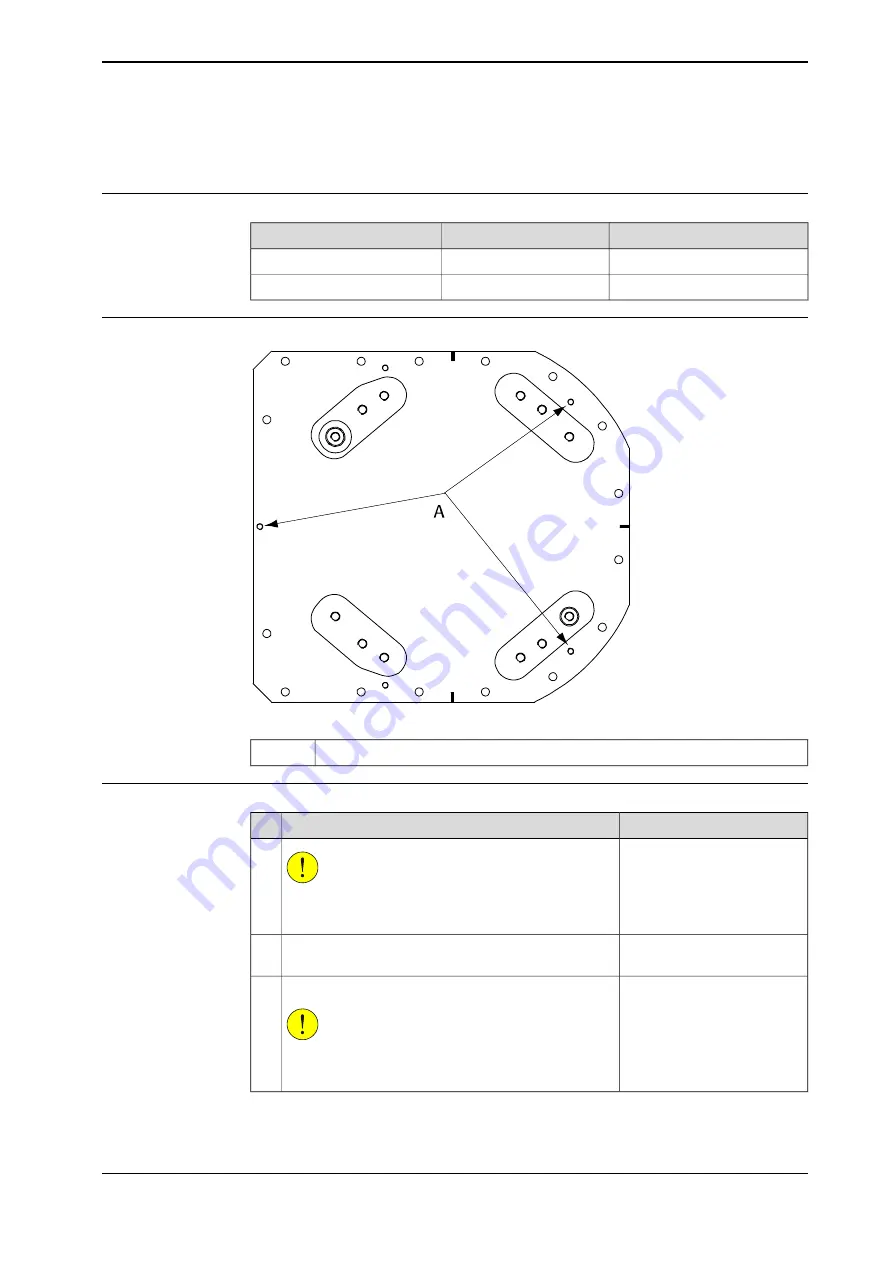
Hole configuration
xx0200000096
Attachment holes for lifting eyes (x3)
A
Lifting, base plate
Note
Action
CAUTION
The base plate weighs 353 kg. All lifting accessories
used must be sized accordingly.
1
Shown in figure
.
Fit lifting eyes in specified holes.
2
Fit lifting slings to the eyes and to the lifting accessory.
CAUTION
Lift and move the base plate very slowly. If the base
plate starts to swing it is a risk for injuries or damage.
3
Product manual - IRB 6620
81
3HAC027151-001 Revision: T
© Copyright 2006-2018 ABB. All rights reserved.
2 Installation and commissioning
2.5.5 Lifting the base plate
Summary of Contents for IRB 6620
Page 1: ...ROBOTICS Product manual IRB 6620 ...
Page 8: ...This page is intentionally left blank ...
Page 176: ...This page is intentionally left blank ...
Page 338: ...This page is intentionally left blank ...
Page 350: ...This page is intentionally left blank ...
Page 352: ...This page is intentionally left blank ...
Page 358: ......
Page 359: ......



































































