





























1 Description
1.4.1 Fine calibration
3HAC 025861-001
Rev.E
21
1.4 Calibration and references
1.4.1 Fine calibration
General
Fine calibration is made using the Calibration Pendulum, please see Operating
manual - Calibration Pendulum.
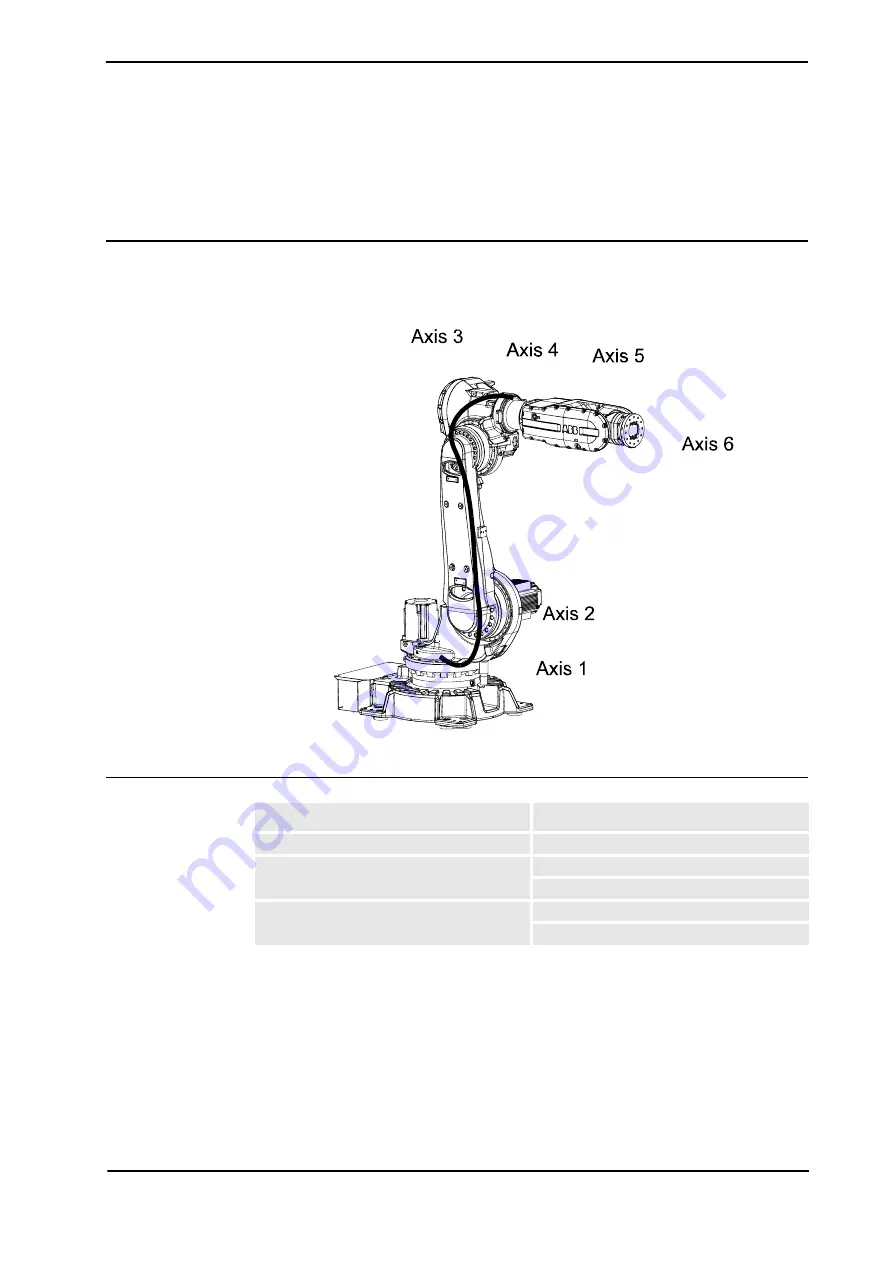
Figure 9 All axes in zero position.
Calibration
Calibration
Position
Calibration of all axes
All axes are in zero position
Calibration of axis 1 and 2
Axis 1 and 2 in zero position
Axis 3 to 6 in any position
Calibration of axis 1
Axis 1 in zero position
Axis 2 to 6 in any position
Summary of Contents for IRB 6620
Page 1: ...Product specification Articulated robot IRB 6620 150 2 2 M2004...
Page 2: ......
Page 3: ...Product specification Articulated robot 3HAC025861 001 Rev E IRB 6620 150 2 2 M2004...
Page 116: ...2 DressPack and SpotPack 2 9 1 Options 114 Rev E 3HAC 025861 001...
Page 132: ...3 Specification of Variants and Options 3 1 14 Documentation 130 Rev E 3HAC 025861 001...
Page 134: ...4 Accessories 132 Rev E 3HAC 025861 001...
Page 137: ......



































































