





























4 Repair
4.4.5. Replacement of complete lower arm
283
3HAC026876-001 Revision: F
© Copyri
ght
200
7-2010 ABB.
All rights reserved.
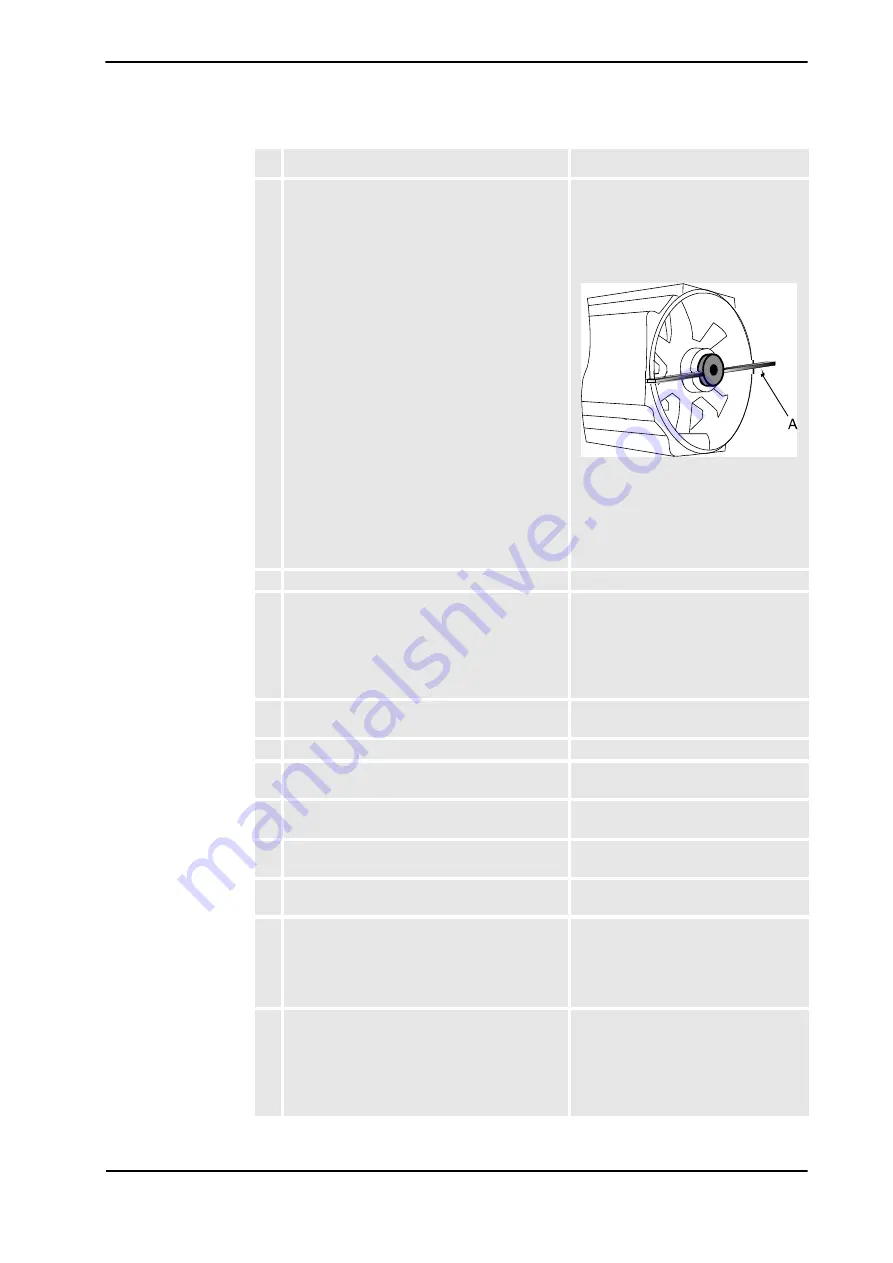
7. In case the hole pattern of the lower arm and
the gearbox axis 2 does not match, use power
supply to release the motor axis 2 brakes and
rotate the pinion and gear with the rotational
tool.
Connect power supply to connector
R2.MP2
•
+: pin 2
•
-: pin 5
xx0200000165
The rotation tool (A) is used beneath
the motor cover, directly on the motor
shaft as shown in figure above.
8. Disconnect the power supply, if used.
9. Secure the lower arm with 18 of the
20attachment screws and washers in gearbox,
axis 2.
20 pcs: M16 x 50, tightening torque:
300 Nm.
Reused screws may be used,
providing they are lubricated as
detailed in the section
before fitting.
10. Remove the guidings and secure the two
remaining screws as detailed above!
11. Remove the lifting tool from the lower arm.
12. Refit and restore the balancing device.
Detailed in section
Refitting of
balancing device
.
13. Refit the upper arm.
Detailed in section
.
14. Perform a leak-down test.
Detailed in section
15. Refill the gearbox with oil.
.
16. Refit and reconnect all cables inside the lower
arm.
Resecure any cable attachments.
Detailed in section
Detailed in section
cable harness, Cleanroom on page
224
17. Recalibrate the robot!
Calibration is detailed in a separate
calibration manual enclosed with the
calibration tools.
General calibration information is
included in the section
Calibration
information
.
Action
Note
Continued
Continues on next page

































































