





























4 Repair
4.4.6. Securing the lower arm
3HAC020993-001 Revision: G
272
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
7. Fit the
fixture, lower arm
to the frame and the lower
arm, according to following instruction:
1. Fit the both adjusters in the correct holes and
make sure that they are screwed back (C).
2. Align the fixture with the frame and lower
arm.
3. Make sure the fixture is pressed tightly
against the lower arm before securing with
screws!
4. Fit and tighten the four M16 bolts in the
attachment holes on the inside of the frame
with tightening torque: 220 Nm (A).
5. Screw in the two adjusters until they rest
against the flats on the lower arm. Tighten by
hand.
6. Lock, using the two ring nuts.
7. Fit and tighten the two M12 bolts in the
attachment holes on the lower arm with
tightening torque: 91 Nm (C).
Art. no. is specified in
.
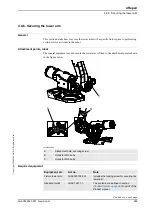
Attachment holes on the frame
and on the lower arm are shown in
the figure
The adjusters, bolts and ring nuts
are shown in the figure
xx0300000610
•
A: Holes for M16 bolts.
Choose the 2 suitable
holes for current robot
model.
•
B: Holes for M16 bolts.
•
C: Holes for M12 bolts (2
pcs), adjusters, ring nuts
and washers. Choose the
suitable holes for current
robot model.
8. The lower arm is now secured and it is safe to
remove the gearbox of axis 2, according to section
Removal, gearbox axis 2 on page 348
, provided that
the balancing device is unloaded.
Action
Note/Illustration
Continued
































































