





























2 Installation and commissioning
2.2.1. Pre-installation procedure
45
3HAC020993-001 Revision: G
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
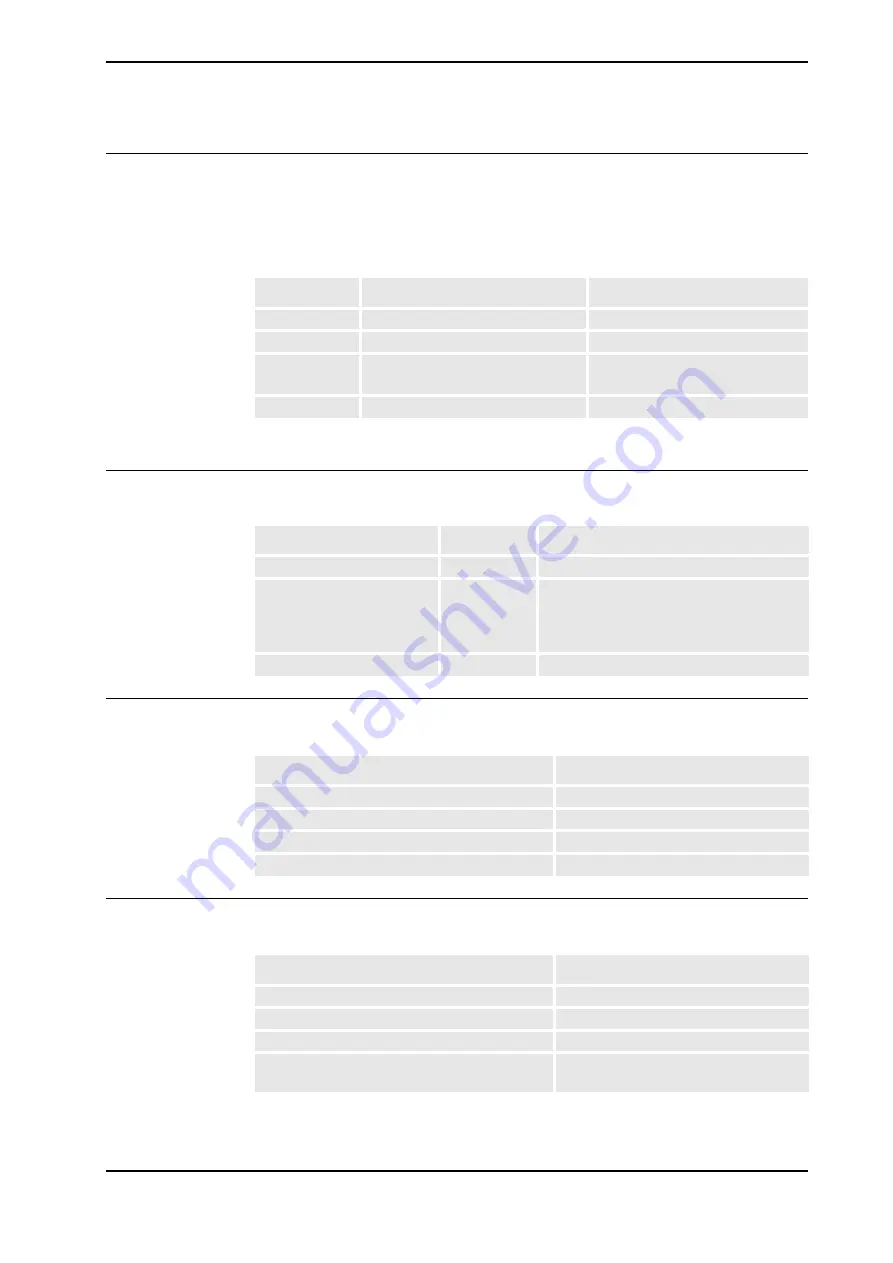
Loads on foundation, robot
The table below shows the various forces and torques working on the robot during different
kinds of operation, in relation to the base coordinate system.
Note!
These forces and torques are extreme values that are rarely encountered during
operation. The values also never reach their maximum at the same time!
* When using base spacers (option 571-1).
Requirements, foundation
The table below shows the requirements for the foundation where the weight of the installed
robot is included:
Storage conditions, robot
The table below shows the allowed storage conditions for the robot:
Operating conditions, robot
The table below shows the allowed operating conditions for the robot:
Force
Endurance load (operation)
Max. load (emergency stop)
Force xy
± 9 kN
± 20 kN
Force z
29 ± 7 kN
30 ± 14 kN
Torque xy
± 29 kNm
± 31 kNm*
± 43 kNm
± 55.6 kNm*
Torque z
± 8 kNm
± 15 kNm
Requirement
Value
Note
Min. levelity
0.5 mm
Max. tilt
5°
The limit for the maximum load on the robot
is reduced if the robot is tilted.
Contact ABB for further information about
acceptable loads.
Min. resonance frequency
22 Hz
Parameter
Value
Min. ambient temperature
-25° C
Max. ambient temperature
+55° C
Max. ambient temperature (less than 24 hrs)
+70° C
Max. ambient humidity
Max. 95% at constant temperature
Parameter
Value
Min. ambient temperature
+5° C
Max. ambient temperature
+50° C
Max. ambient humidity
Max. 95% at constant temperature
Max. ambient humidity (Foundry Prime)
100% if robot installed and maintained in
accordance with the the manual.
Continued
Continues on next page


































































