





























Note
Action
xx0500002312
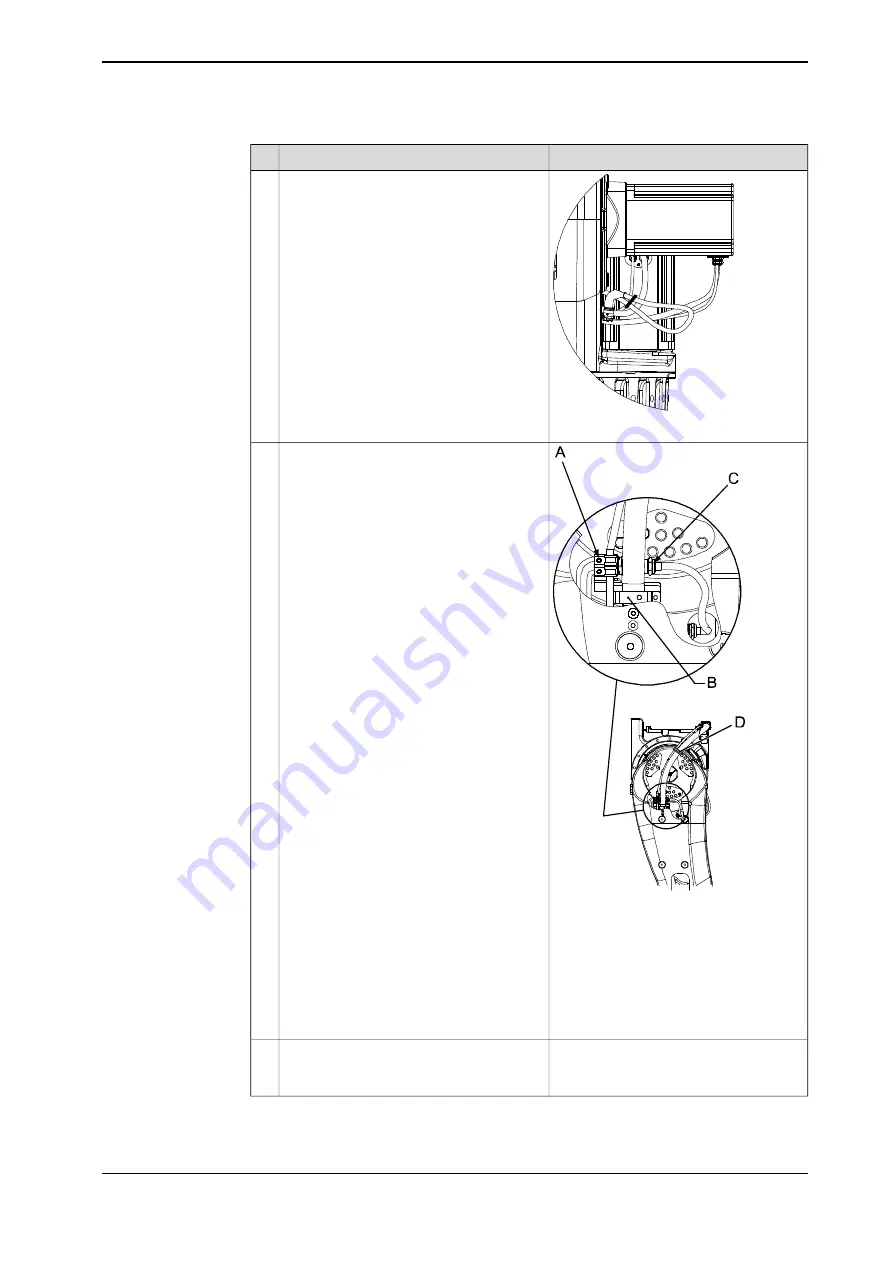
Connect the connector R3.FAN2 to the fan
of either axis 1 or axis 2.
If no fan is used, strap the cabling together
with the motor cabling so that the connector
stays close to the frame, as shown in the
figure to the right.
6
xx0500002313
Run the remaining cable harness up through
the lower arm and:
•
secure with the
bracket, lower arm
,
as shown in the figure to the right.
•
connect the connector R2.SW3 to the
position switch of axis 3.
•
secure the cable going to the fan of
axis 3, together with the robot cabling
with a velcro strap.
7
A Bracket, lower arm. Also shown in
the figure
tion switches and fans, axes 1-3 on
page 115
B Bracket for robot cabling
C Connector R2.SW3
D Velcro strap
Shown in the figure
position switches and fans, axes 1-3 on
page 115
.
Secure the axis 3 fan cable with the
bracket,
upper arm
.
8
Continues on next page
Product manual - IRB 6650S
117
3HAC020993-001 Revision: Z
© Copyright 2004-2018 ABB. All rights reserved.
2 Installation and commissioning
2.4.6 Installation of position switches (option)
Continued
Summary of Contents for IRB 6650S Series
Page 1: ...ROBOTICS Product manual IRB 6650S ...
Page 20: ...This page is intentionally left blank ...
Page 50: ...This page is intentionally left blank ...
Page 210: ...This page is intentionally left blank ...
Page 416: ...This page is intentionally left blank ...
Page 422: ...This page is intentionally left blank ...
Page 426: ...This page is intentionally left blank ...
Page 449: ......







































































