





























Velcro straps
D
Cable gland, lower arm
E
Required equipment
Note
Spare part no.
Equipment
3HAC038800-001
Cable harness axes 1-6
Motor axis 6
3HAC12877-1
Gasket
Content is defined in section
-
Standard toolkit
These procedures include references
to the tools required.
Other tools and procedures
may be required. See refer-
ences to these procedures
in the step-by-step instruc-
tions below.
See chapter
.
Circuit diagram
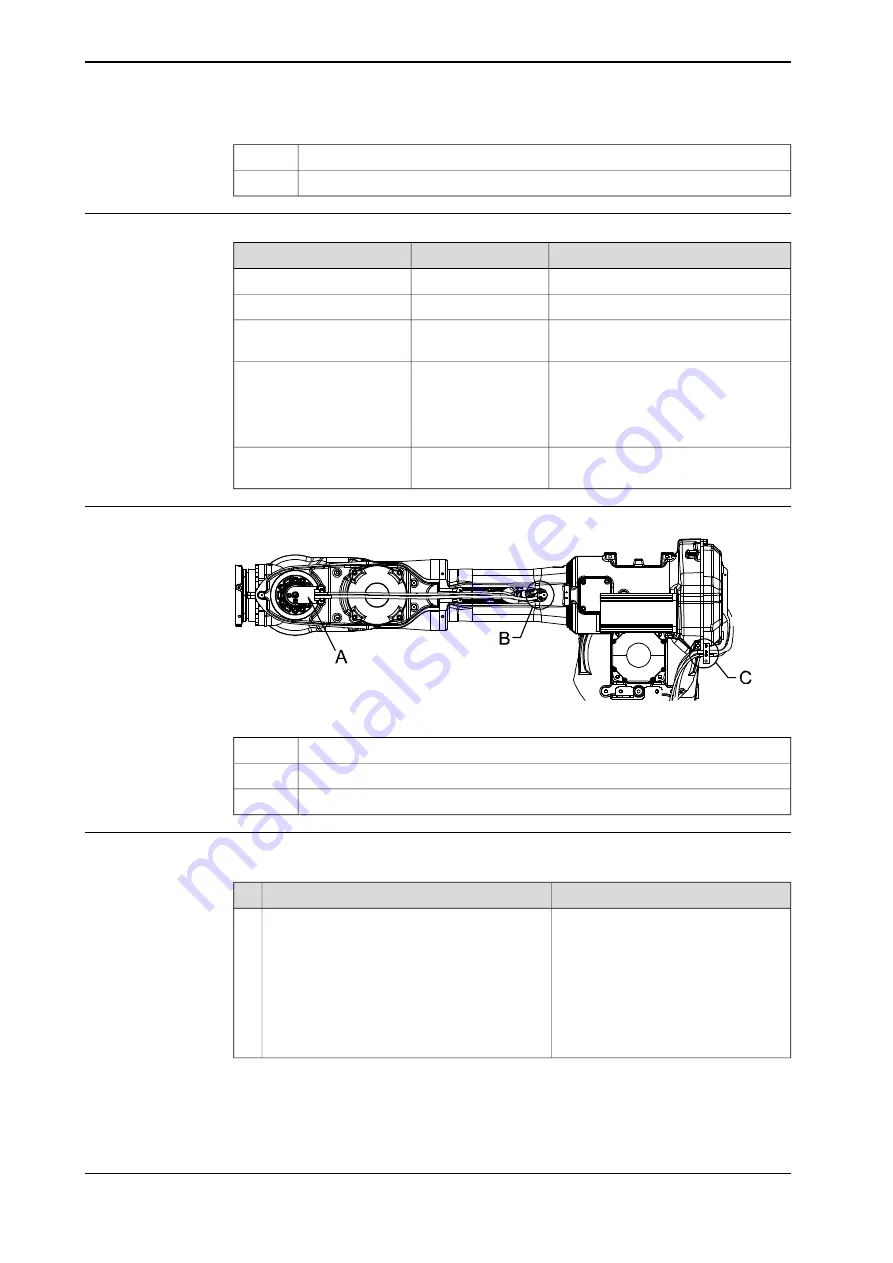
Cable brackets of the upper arm
xx0500002293
Cable bracket, wrist unit
A
Cable bracket, upper arm tube
B
Cable attachment, rear
C
Removing the cable harness - upper arm
Use this procedure to remove the cable harness from the upper arm of the robot.
Note
Action
Axes 2 and 3 may be tilted slightly to
improve access.
In order to facilitate refitting of the cable har-
ness, run the robot to the specified position:
•
Axis 1: 0 °
•
Axis 2: 0 °
•
Axis 3: 0 °
•
Axis 4: 0 °
•
Axis 5: +90 °
•
Axis 6: no significance
1
Continues on next page
220
Product manual - IRB 6650S
3HAC020993-001 Revision: Z
© Copyright 2004-2018 ABB. All rights reserved.
4 Repair
4.3.1 Replacing cable harness, axes 1-6
Continued
Summary of Contents for IRB 6650S Series
Page 1: ...ROBOTICS Product manual IRB 6650S ...
Page 20: ...This page is intentionally left blank ...
Page 50: ...This page is intentionally left blank ...
Page 210: ...This page is intentionally left blank ...
Page 416: ...This page is intentionally left blank ...
Page 422: ...This page is intentionally left blank ...
Page 426: ...This page is intentionally left blank ...
Page 449: ......







































































