





























Note
Action
If the robot is to be calibrated with fine
calibration:
Remove all external cable packages
(DressPack) and tools from the robot.
Removal, arm system
Use this procedure to lift and remove the complete arm system.
Note
Action
Decide which calibration routine
to use, and take actions accord-
ingly prior to beginning the re-
pair procedure.
1
Release the brakes if necessary, as detailed in section
Manually releasing the brakes on page 70
xx0300000632
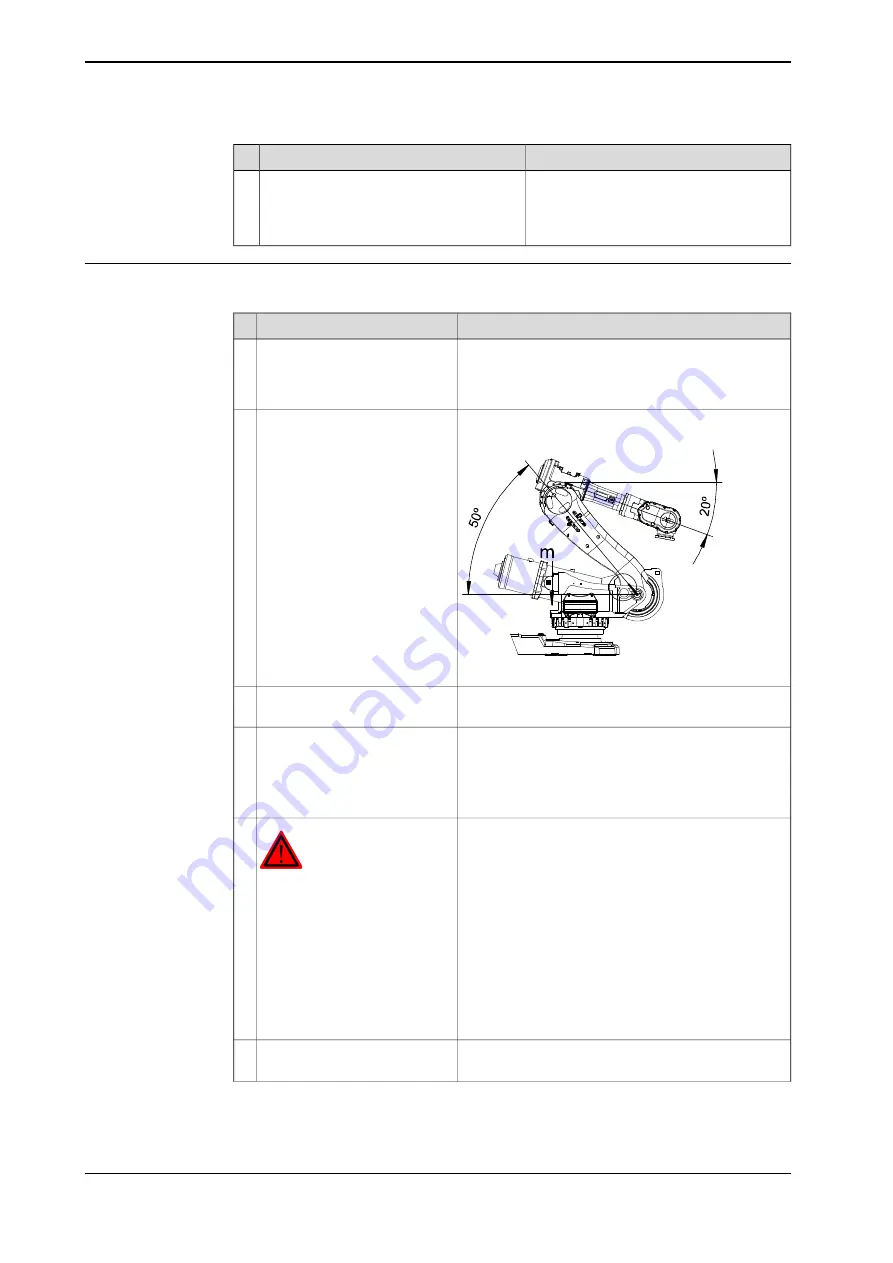
Run the robot to the position
shown in the figure to the right.
2
Run the overhead crane to a
position above the robot.
3
Art. no. is specified in
Required equipment on page 249
Fit the
lifting accessory
and ad-
just it as detailed in the enclosed
instructions
.
4
Make sure the lift is done completely level! How to
adjust the lift is described in the enclosed instruction
to the lifting accessory!
Read the instructions before
lifting!
DANGER
Turn off all:
•
electric power supply to
the robot
•
hydraulic pressure supply
to the robot
•
air pressure supply to the
robot
Before entering the robot work-
ing area.
5
Detailed in section
Changing oil, axis-1 gearbox on
.
Drain the oil from gearbox axis
1.
6
Continues on next page
250
Product manual - IRB 6650S
3HAC020993-001 Revision: Z
© Copyright 2004-2018 ABB. All rights reserved.
4 Repair
4.3.5 Replacement of complete arm system
Continued
Summary of Contents for IRB 6650S Series
Page 1: ...ROBOTICS Product manual IRB 6650S ...
Page 20: ...This page is intentionally left blank ...
Page 50: ...This page is intentionally left blank ...
Page 210: ...This page is intentionally left blank ...
Page 416: ...This page is intentionally left blank ...
Page 422: ...This page is intentionally left blank ...
Page 426: ...This page is intentionally left blank ...
Page 449: ......







































































