





























4 Repair
4.7.1. Replacement of gearbox, axis 1
245
3HAC028197-001 Revision: A
©
Co
py
rig
h
t 200
7-
200
8 ABB. All righ
ts reser
v
ed.
Removal, gearbox axis 1
The procedure below details how to remove gearbox, axis 1.
Action
Note
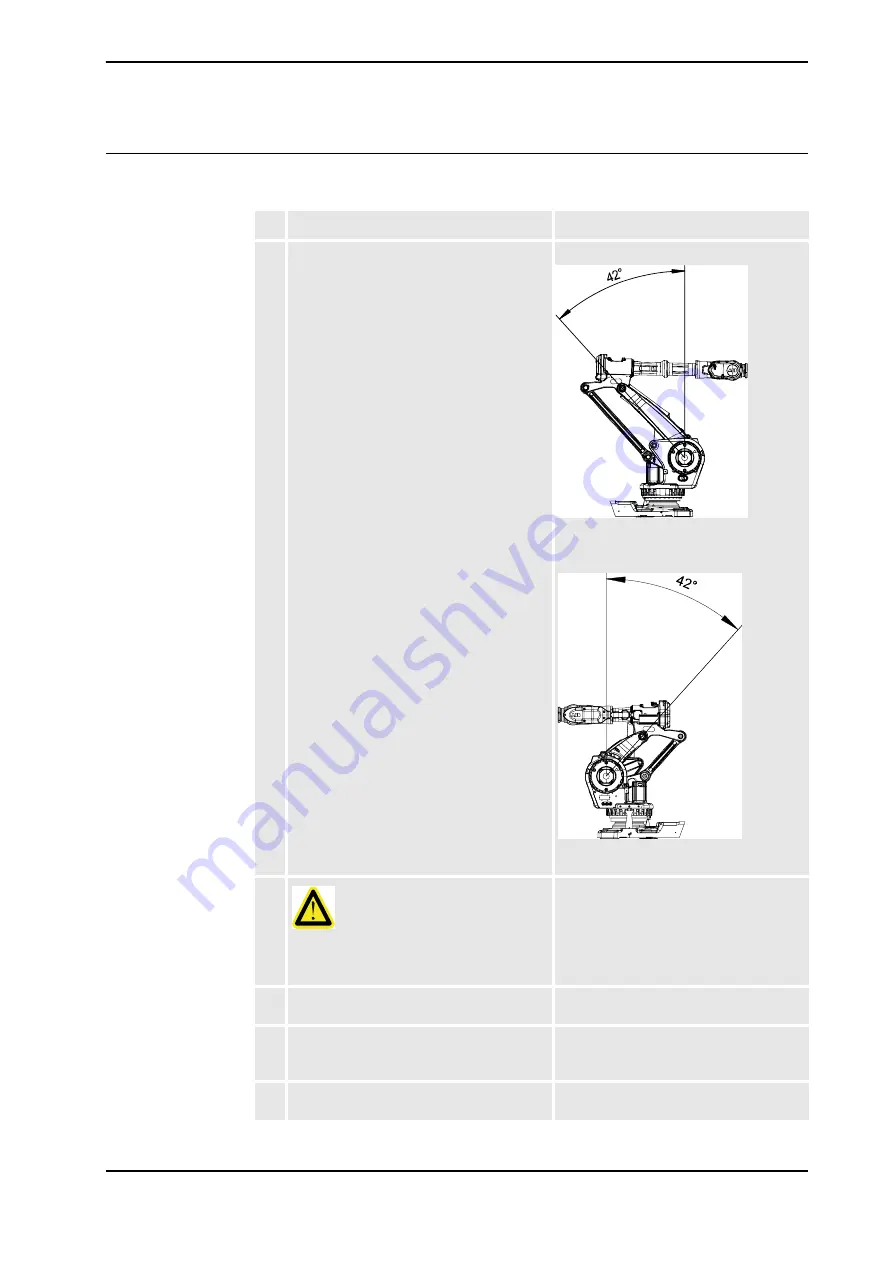
1. Move the robot to its most stable position,
shown in the figure to the right.
xx0700000137
Robot variant IRB 6660 - 130/3.1
xx0700000518
Robot variant IRB 6660 - 205/1.9
2.
DANGER!
Turn off all electric power, hydraulic and
pneumatic pressure supplies to the robot!
3. Drain the oil from gearbox 1.
Detailed in section
.
4. Disconnect all cabling in the rear of the
robot base and remove the cable support
plate inside of the base.
harness, lower end (axes 1-3) on page
147
.
5. Pull the disconnected cabling up through
the center of gearbox 1.
Continued
Continues on next page
Summary of Contents for IRB 6660 - 130/3.1
Page 1: ...Product manual Articulated robot IRB 6660 130 3 1 IRB 6660 205 1 9 M2004 ...
Page 2: ......
Page 332: ... 0 1 23 3 4 5 5 6 2 70 2 888 2 9 6 0 9 9 2 A 8B C D 9 8 B ...
Page 333: ... 2 3 4 5 5 6 2 70 2 888 2 9 6 0 9 9 1 EF 2 888 2 9 6 9 9 8 B ...
Page 336: ... 98 2 888 7 066 0 10I 4 5 5 06 6 2 70 2 888 2 9 6 0 9 9 G E 7 F E 7 F 9 8 B ...
Page 347: ......







































































