





























4 Repair
4.4.2. Replacement of complete wrist unit
3HAC028197-001 Revision: A
186
©
Co
py
rig
h
t 200
7-
200
8 ABB. All righ
ts reser
v
ed.
4.
CAUTION!
The complete wrist unit weighs 130 kg! All
lifting equipment used must be sized accord-
ingly!
5. Lift the wrist unit and guide it to the upper arm
tube with help of the guide pins.
Make sure the cabling from motor, axis 5 is
safely run into the arm tube and does not get
jammed.
6. Secure the wrist unit with 10 of the 12
attachment screws
and
washers
.
.
12 pcs: M12 x 50, 12.9 quality
UNBRAKO, tightening torque: 115 Nm.
Reused screws may be used, providing
they are lubricated as detailed in
section
before fitting.
7. Remove the guide pins and secure the two
remaining attachment screws as detailed
above.
8. Remove the lifting tool from the wrist unit.
9. Reconnect the motor axis 5 by connecting the
two
connectors inside the upper arm tube
(R3.FB5, R3.MP5) and secure the cable
bracket with the two attachment screws to the
tube.
.
10.
NOTE!
Axis 5 must be oriented in the correct position
(+90º) to allow the motor 6 cover to open!
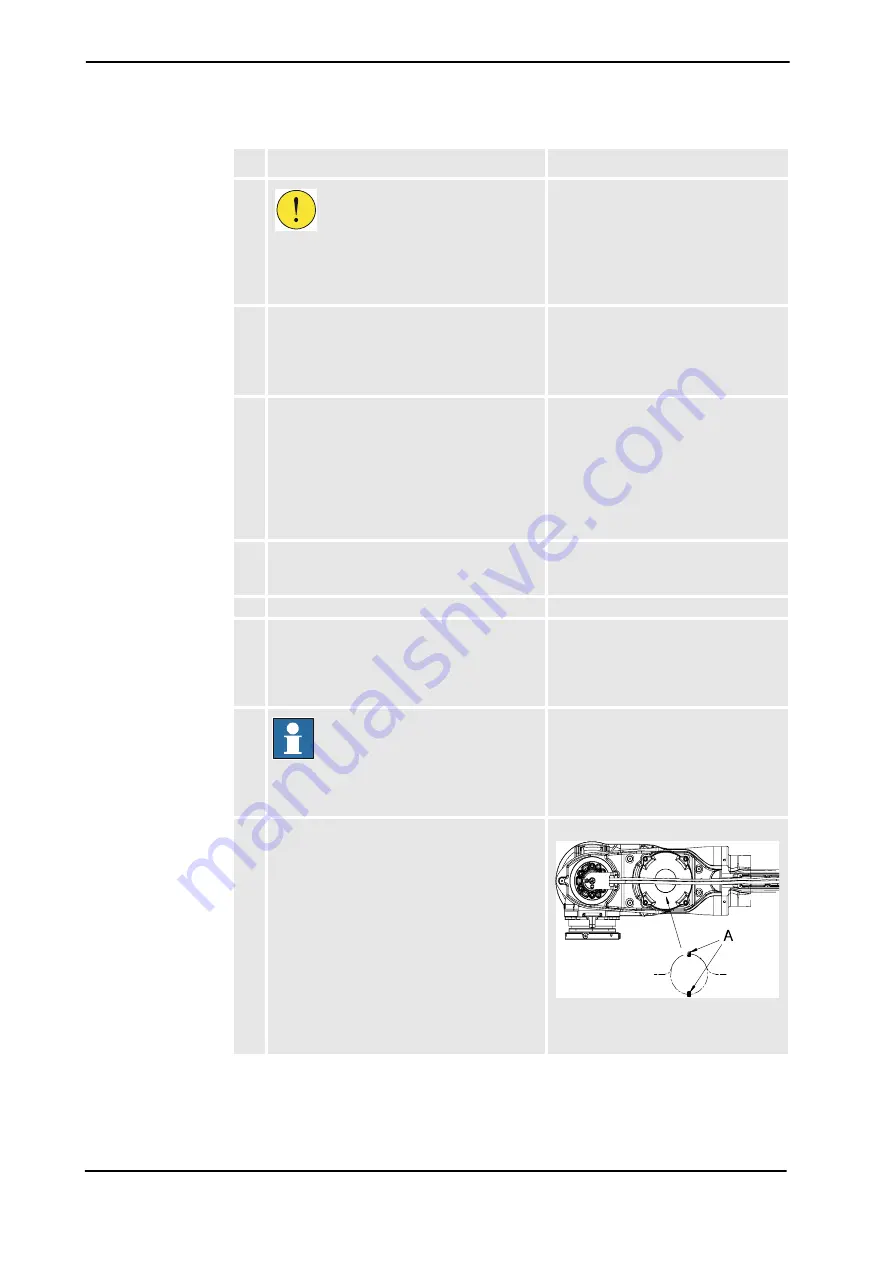
11. Place the cabling to motor axis 6 correctly on
the upper arm and gently pull the connectors
through the hole on top of wrist unit to motor,
axis 6.
In case of excess of cable length:
•
put the excess cable in a loop in the
area shown in the figure and secure
with with
cable straps
. Cables are
longer in order to fit different upper arm
lengths.
xx0200000185
Parts:
•
A: Cable straps
Action
Note
Continued
Continues on next page
Summary of Contents for IRB 6660 - 130/3.1
Page 1: ...Product manual Articulated robot IRB 6660 130 3 1 IRB 6660 205 1 9 M2004 ...
Page 2: ......
Page 332: ... 0 1 23 3 4 5 5 6 2 70 2 888 2 9 6 0 9 9 2 A 8B C D 9 8 B ...
Page 333: ... 2 3 4 5 5 6 2 70 2 888 2 9 6 0 9 9 1 EF 2 888 2 9 6 9 9 8 B ...
Page 336: ... 98 2 888 7 066 0 10I 4 5 5 06 6 2 70 2 888 2 9 6 0 9 9 G E 7 F E 7 F 9 8 B ...
Page 347: ......

































































