





























Note
Action
Lift the upper arm and put it on the guide
pins.
3
24 VDC power supply
If the axis-3 motor is installed to the upper
arm:
4
Rotation tool
In order to release the brakes, connect the
24 VDC power supply.
Connect to R2.MP3-connector:
•
+ = pin 2
•
- = pin 5
Use the rotation tool and rotate the axis-3
motor to find the correct position for the
guide pins in the lower arm.
Pinion:
If the axis-3 motor is not installed to the
upper arm:
5
3HAC067546-001
i
Use the pinion to rotate the axis-3 gearbox
to find the correct position for the guide
pins in the lower arm.
3HAC067547-001
ii
3HAC067545-001
iii
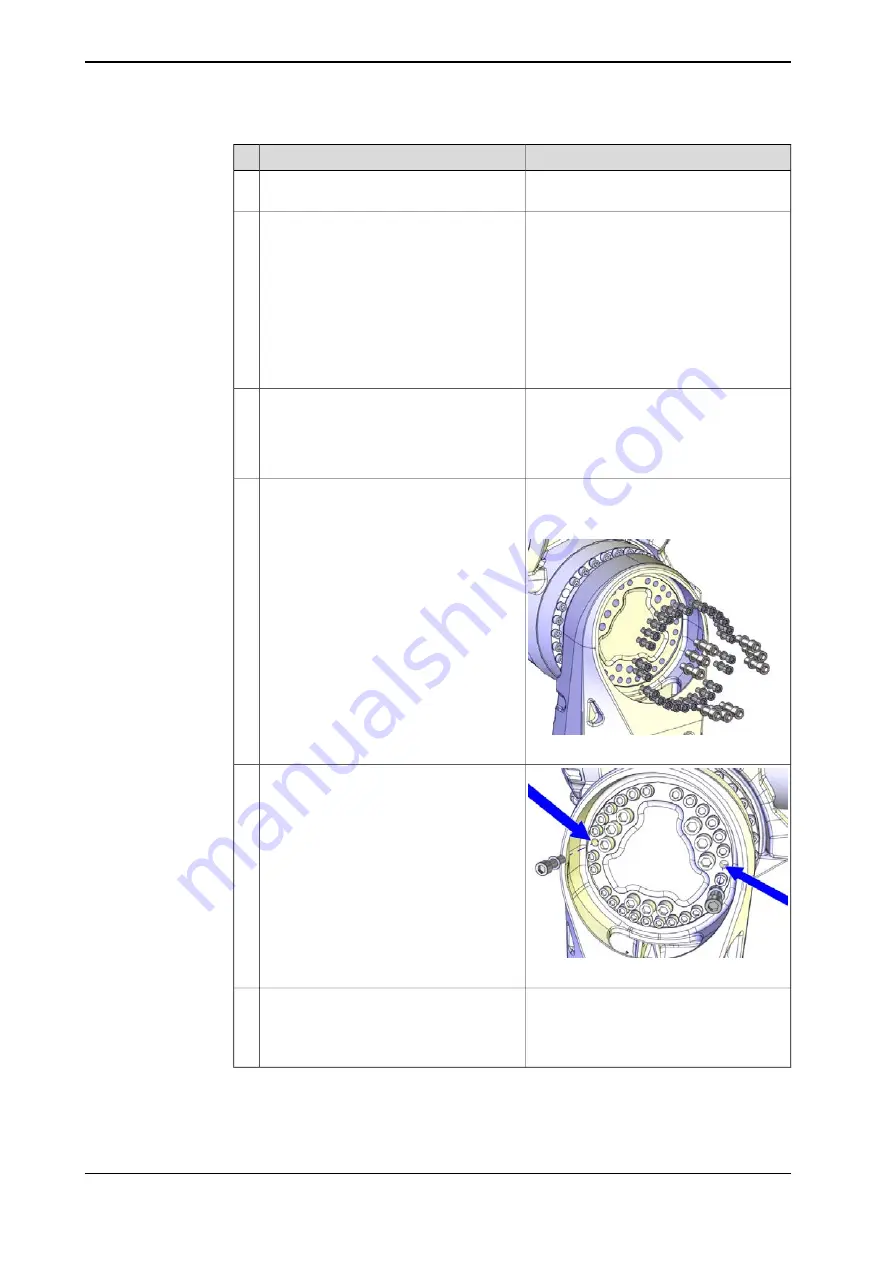
Screws:
Insert all nine M16 screws and 25 of the 27
M12 screws.
6
M16 (9 pcs)
M12 (25 of 27 pcs)
xx1400000359
xx1300000659
Remove the guide pins and fit the two re-
maining M12 screws.
7
Tightening torque depends on screw dimen-
sion.
Secure the upper arm by tightening the at-
tachment screws.
8
Tightening torque, M16: 300 Nm
Tightening torque, M12: 120 Nm
i
IRB 6700 - 235/2.65, IRB 6700 - 205/2.80, IRB 6700 - 175/3.05, IRB 6700 - 150/3.20
ii
IRB 6700 - 200/2.60, IRB 6700 - 155/2.85
iii
IRB 6700 - 300/2.70, IRB 6700 - 245/3.00
Continues on next page
320
Product manual - IRB 6700
3HAC044266-001 Revision: N
© Copyright 2013 - 2018 ABB. All rights reserved.
4 Repair
4.5.1 Replacing the upper arm
Continued
Summary of Contents for IRB 6700 Series
Page 1: ...ROBOTICS Product manual IRB 6700 ...
Page 46: ...This page is intentionally left blank ...
Page 110: ...This page is intentionally left blank ...
Page 786: ...This page is intentionally left blank ...
Page 812: ...This page is intentionally left blank ...
Page 836: ...This page is intentionally left blank ...
Page 838: ...This page is intentionally left blank ...
Page 845: ......





































































