





























Note
Action
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the robot
working area.
9
Preparations before removing the rear bearings
Note
Action
Jog axis-2 to the calibration position (if not
already in this position).
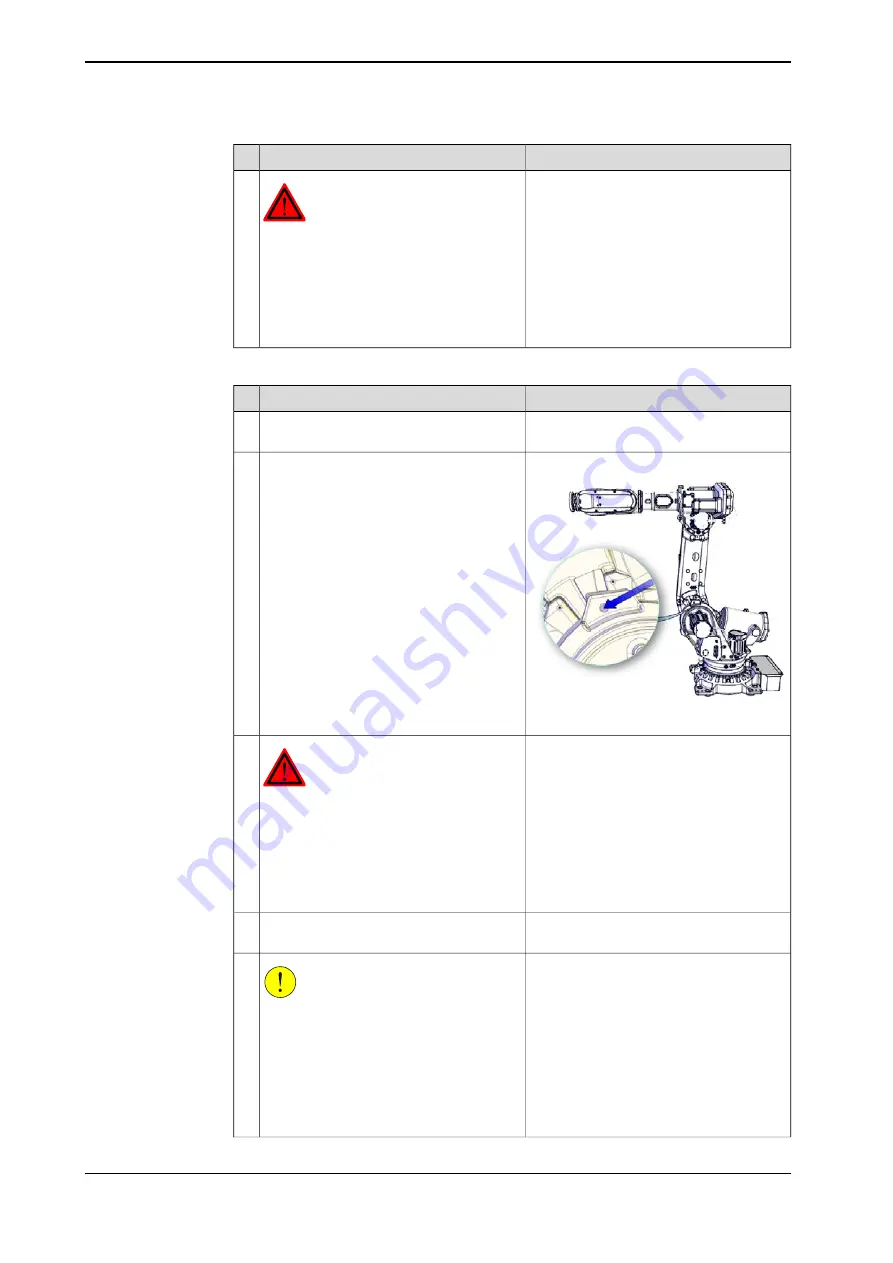
1
Lock screw, M16x120
xx1200001116
Fit a locking screw through the hole for the
lock screw in the frame and into the lower
arm (or using a lifting accessory or similar).
The lock screw is used to secure the weight
of the lower arm, in order to avoid acci-
dents or damage.
2
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the robot
working area.
3
Remove any equipment, if fitted, on or
close to the balancing device.
4
CAUTION
The weight of the balancing device (exclud-
ing cradle) is
140 kg (IRB 6700 -235/2.65, -205/2.80,
-175/3.05, -150/3.20, -200/2.60, -155/2.85)
185 kg (IRB 6700 -300/2.70, -245/3.00)
All lifting accessories used must be sized
accordingly.
5
Continues on next page
482
Product manual - IRB 6700
3HAC044266-001 Revision: N
© Copyright 2013 - 2018 ABB. All rights reserved.
4 Repair
4.6.3 Replacing the rear bearings on the balancing device
Continued
Summary of Contents for IRB 6700 Series
Page 1: ...ROBOTICS Product manual IRB 6700 ...
Page 46: ...This page is intentionally left blank ...
Page 110: ...This page is intentionally left blank ...
Page 786: ...This page is intentionally left blank ...
Page 812: ...This page is intentionally left blank ...
Page 836: ...This page is intentionally left blank ...
Page 838: ...This page is intentionally left blank ...
Page 845: ......







































































