





























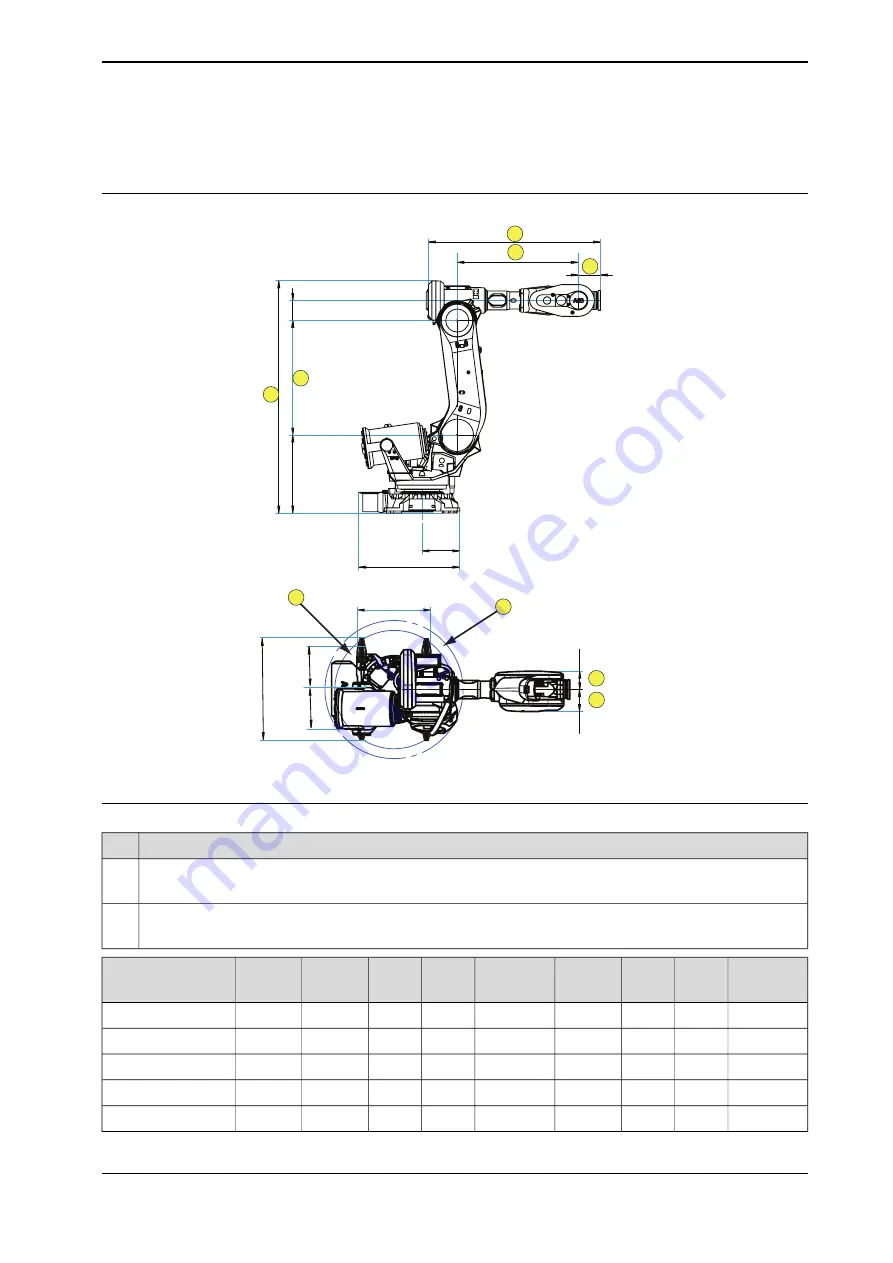
2.2.4 Main dimensions
Illustration
780
200
1009
377
J
D
H
A
E
C
G
F
745
1009
360
360
B
xx1300000241
Dimensions for different robot variants
Description
Pos
Radius ax1, front = 532 mm (IRB 6700-235/2.65, -205/2.80, -175/3.05, -150/3.20, -200/2.60 and -155/2.85)
B
Radius ax1, front = 600 mm (IRB 6700-300/2.70 and -245/3.00)
Radius ax1, back = 633 mm (IRB 6700-235/2.65, -205/2.80, -175/3.05, -150/3.20, -200/2.60 and -155/2.85)
C
Radius ax1, back = 700 mm (IRB 6700-300/2.70 and -245/3.00)
J
H
G
F
LeanID
F
E
D
A
LeanID
A
Robot variant
186
209
1,182.5
1820
1670
1135
2300
350
200
IRB 6700 - 235/2.65
209
186
1,182.5
1820
1670
1280
2445
350
200
IRB 6700 - 205/2.80
186
209
1,592.5
2230
2080
1135
2300
350
200
IRB 6700 - 175/3.05
186
209
1,592.5
2230
2080
1280
2445
350
200
IRB 6700 - 150/3.20
193
197.5
1,142.5
1773
1623
1125
2276
350
200
IRB 6700 - 200/2.60
Continues on next page
Product manual - IRB 6700
59
3HAC044266-001 Revision: N
© Copyright 2013 - 2018 ABB. All rights reserved.
2 Installation and commissioning
2.2.4 Main dimensions
Summary of Contents for IRB 6700 Series
Page 1: ...ROBOTICS Product manual IRB 6700 ...
Page 46: ...This page is intentionally left blank ...
Page 110: ...This page is intentionally left blank ...
Page 786: ...This page is intentionally left blank ...
Page 812: ...This page is intentionally left blank ...
Page 836: ...This page is intentionally left blank ...
Page 838: ...This page is intentionally left blank ...
Page 845: ......







































































