




























Removing and lifting away the lower and upper arms un-separated
Use this procedure to remove and lift away the lower and upper arm un-separated.
Note
Action
Put two pallets on the floor, in front of the
position of the mechanical stop.
Note
Using the method to replace the gearbox
with cable harness and DressPack fitted,
is only a recommendation. If it is not pos-
sible to put the arm system close enough
to the robot and keep the cable harness
partly fitted, it is necessary to remove the
cable harness and DressPack in base and
frame first.
1
CAUTION
The lower and upper arms together weigh
650 kg.
All lifting accessories used must be sized
accordingly!
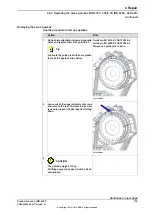
2
xx1700000442
Remove the remaining screw and lift away
the lower and upper arm together.
Let the cabling run in the lower arm. Make
sure not to stretch any cabling!
Note
Two persons required. One person to oper-
ate the overhead crane and one person to
handle the arm system.
3
Use a piece of wood or similar as a support
under the arm house when the arm system
is put down on the pallets.
4
This is done in order not to damage any
parts of the cable harness and DressPack.
Disconnecting the axis-2 motor cables
Use this procedure to disconnect the motor cables.
Note
Action
DANGER
Make sure that all supplies for electrical
power, hydraulic pressure, and air pressure
are turned off.
1
Continues on next page
Product manual - IRB 6700
715
3HAC044266-001 Revision: N
© Copyright 2013 - 2018 ABB. All rights reserved.
4 Repair
4.8.4 Replacing the axis-2 gearbox (IRB 6700 - 300/2.70, IRB 6700 - 245/3.00)
Continued
Summary of Contents for IRB 6700 Series
Page 1: ...ROBOTICS Product manual IRB 6700 ...
Page 46: ...This page is intentionally left blank ...
Page 110: ...This page is intentionally left blank ...
Page 786: ...This page is intentionally left blank ...
Page 812: ...This page is intentionally left blank ...
Page 836: ...This page is intentionally left blank ...
Page 838: ...This page is intentionally left blank ...
Page 845: ......







































































