




























Note
Article number
Equipment, etc.
3HAC16131-1
Lifting eye, M12
Outer diameter: minimum 26 mm,
maximum 30 mm, hole diameter: 13
mm, thickness: 3 mm.
-
Fender washer
SA-10-8-NA1
-
Lifting shackle, 2 pcs
Lifting capacity: 2,000 kg.
-
Roundsling, 2 m
Lifting instruction 3HAC15880-2 en-
closed.
3HAC15556-1
Lifting accessory (chain)
Content is defined in section
.
-
Standard toolkit
Attaching lifting accessories to the lower and upper arm
Robot position
Note
Action
See
Replacing the axis-2 gearbox on
Follow the procedure of replacing the axis-
2 gearbox to get the robot prepared for at-
tachment of the lifting accessories for lift
of the un-separated lower and upper arm.
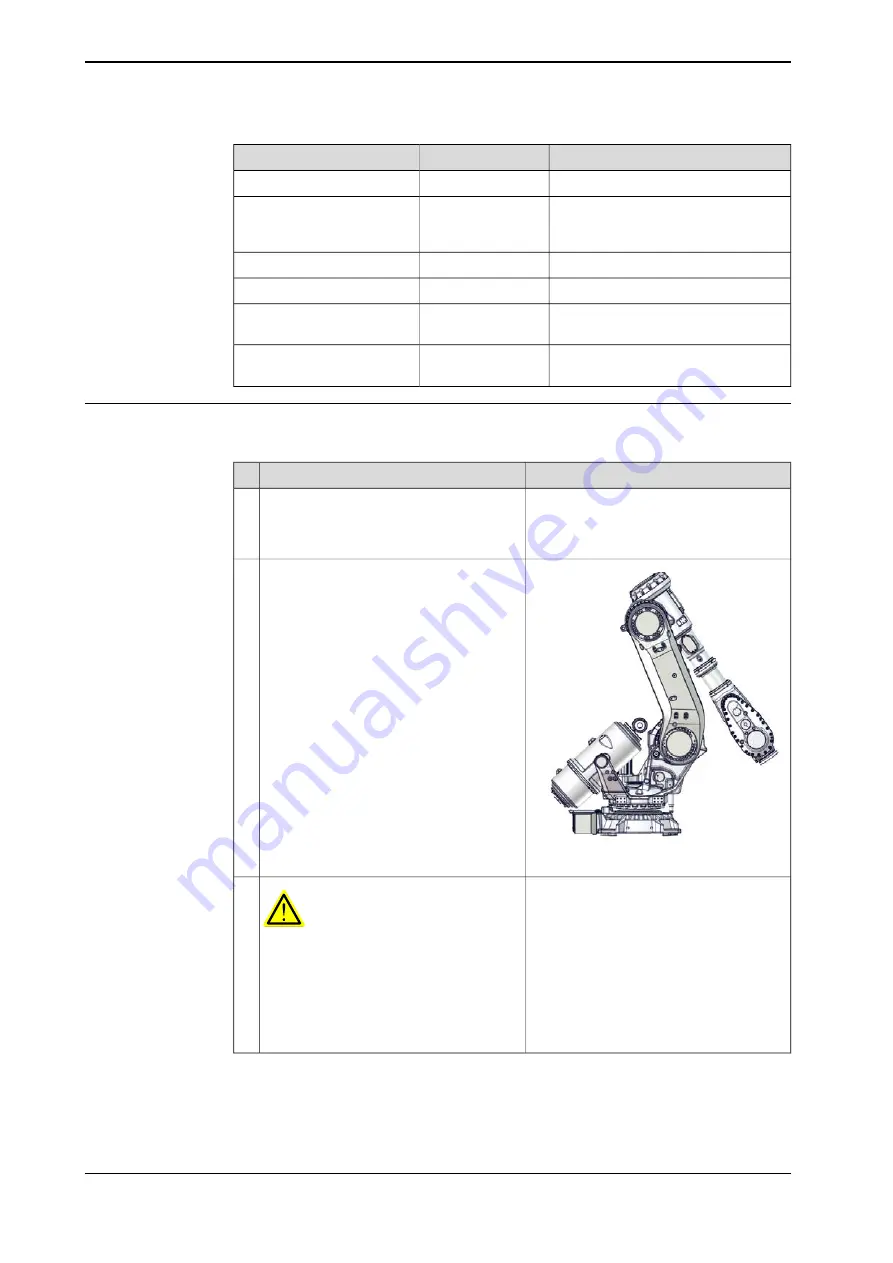
1
xx1700000374
Jog the robot into position:
•
Axis 1: position the axis 1 to be able
to put down the arm system after
removal
•
Axis 2: -15°
•
Axis 3: +70° (approximately)
•
Axis 4: 0°
•
Axis 5: 0° (-90° if DressPack is in-
stalled)
•
Axis 6: 0° (+90° if DressPack is in-
stalled)
2
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the safe-
guarded space.
3
Continues on next page
202
Product manual - IRB 6700Inv
3HAC058254-001 Revision: L
© Copyright 2017 - 2020 ABB. All rights reserved.
4 Repair
4.3.2 Attaching lifting accessories to an un-separated lower and upper arm
Continued
Summary of Contents for IRB 6700Inv
Page 1: ...ROBOTICS Product manual IRB 6700Inv ...
Page 16: ...This page is intentionally left blank ...
Page 40: ...This page is intentionally left blank ...
Page 182: ...This page is intentionally left blank ...
Page 672: ...This page is intentionally left blank ...
Page 704: ...This page is intentionally left blank ...
Page 720: ...This page is intentionally left blank ...
Page 722: ...This page is intentionally left blank ...
Page 729: ......







































































