





























Note
Action
870
50
600
50
60°
65°
35°
30°
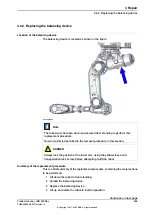
xx1700000555
Jog the robot into position:
•
Axis 1: 0°
•
Axis 2: already in position and locked with
the transportation lock screw, do not jog!
•
Axis 3: +65°
•
Axis 4: 0°
•
Axis 5: +60°
•
Axis 6: no significance
4
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the safeguarded
space.
5
Disconnect the robot cables at the base.
6
CAUTION
The weight of the IRB 6700Inv robot is 1,750 kg
All lifting accessories used must be sized accord-
ingly.
7
See user instructions enclosed with
the fork lift accessory set.
Install the fork lift pockets to the robot, if not
already installed.
8
Fork lift accessory set:
3HAC058825-001.
If lifting and turning with the fork lift (rotator attach-
ment required):
1
Insert the forks of the fork lift truck into the
fork lift pockets, as far as possible.
2
Raise the forks of the fork lift truck to make
sure that the weight of the robot rests on
the forks.
Tip
Two M16 screws can be fitted to the fork
lift pockets, to press the forks against the
pockets and make the lift more stable.
9
Continues on next page
Product manual - IRB 6700Inv
413
3HAC058254-001 Revision: L
© Copyright 2017 - 2020 ABB. All rights reserved.
4 Repair
4.6.2 Replacing the balancing device
Continued
Summary of Contents for IRB 6700Inv
Page 1: ...ROBOTICS Product manual IRB 6700Inv ...
Page 16: ...This page is intentionally left blank ...
Page 40: ...This page is intentionally left blank ...
Page 182: ...This page is intentionally left blank ...
Page 672: ...This page is intentionally left blank ...
Page 704: ...This page is intentionally left blank ...
Page 720: ...This page is intentionally left blank ...
Page 722: ...This page is intentionally left blank ...
Page 729: ......







































































