





























Note
Action
xx1700000451
Refit the covers. Make sure that the o-rings are
still fitted.
Note
Only manual force is required, no tightening
torque.
4
Securing the lower arm
Use this procedure to secure the lower arm before lifting the robot to inverted
position.
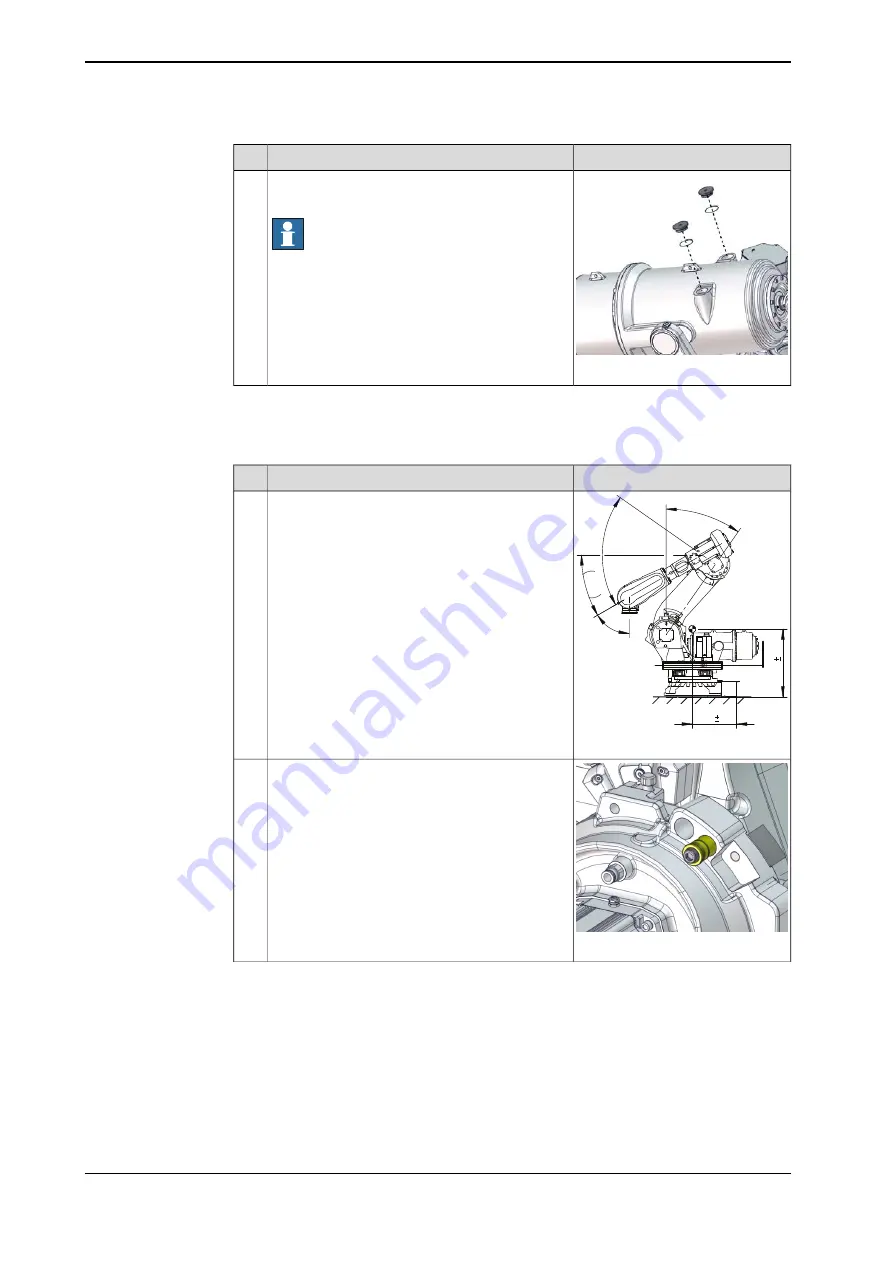
Note
Action
870
50
600
50
60°
65°
35°
30°
xx1600001371
Verify that the robot stands in position:
•
Axis 1: 0°
•
Axis 2: -35°
•
Axis 3: +65°
•
Axis 4: 0°
•
Axis 5: +60°
•
Axis 6: no significance
1
xx1700000348
Remove the transportation lock screw and the
yellow sleeve from the parking position.
2
Continues on next page
428
Product manual - IRB 6700Inv
3HAC058254-001 Revision: L
© Copyright 2017 - 2020 ABB. All rights reserved.
4 Repair
4.6.2 Replacing the balancing device
Continued
Summary of Contents for IRB 6700Inv
Page 1: ...ROBOTICS Product manual IRB 6700Inv ...
Page 16: ...This page is intentionally left blank ...
Page 40: ...This page is intentionally left blank ...
Page 182: ...This page is intentionally left blank ...
Page 672: ...This page is intentionally left blank ...
Page 704: ...This page is intentionally left blank ...
Page 720: ...This page is intentionally left blank ...
Page 722: ...This page is intentionally left blank ...
Page 729: ......






































































