





























Securing the lower arm
Use this procedure to secure the lower arm in order to prevent it from moving if
the point of gravity is shifted in the mechanical structure of the robot during lifting,
transporting or rotation of the robot.
Preparations before securing the lower arm
Note
Action
Remove any tools fitted on the axis-6 turning disc
of the robot.
CAUTION
No tool is permitted to be fitted on the robot when
it is lifted, transported or rotated.
1
Securing the lower arm
Use this procedure to secure the lower arm.
Note
Action
If lifting, rotating or transporting the
robot, all axes angles have to be
defined. See
and securing the robot on page 64
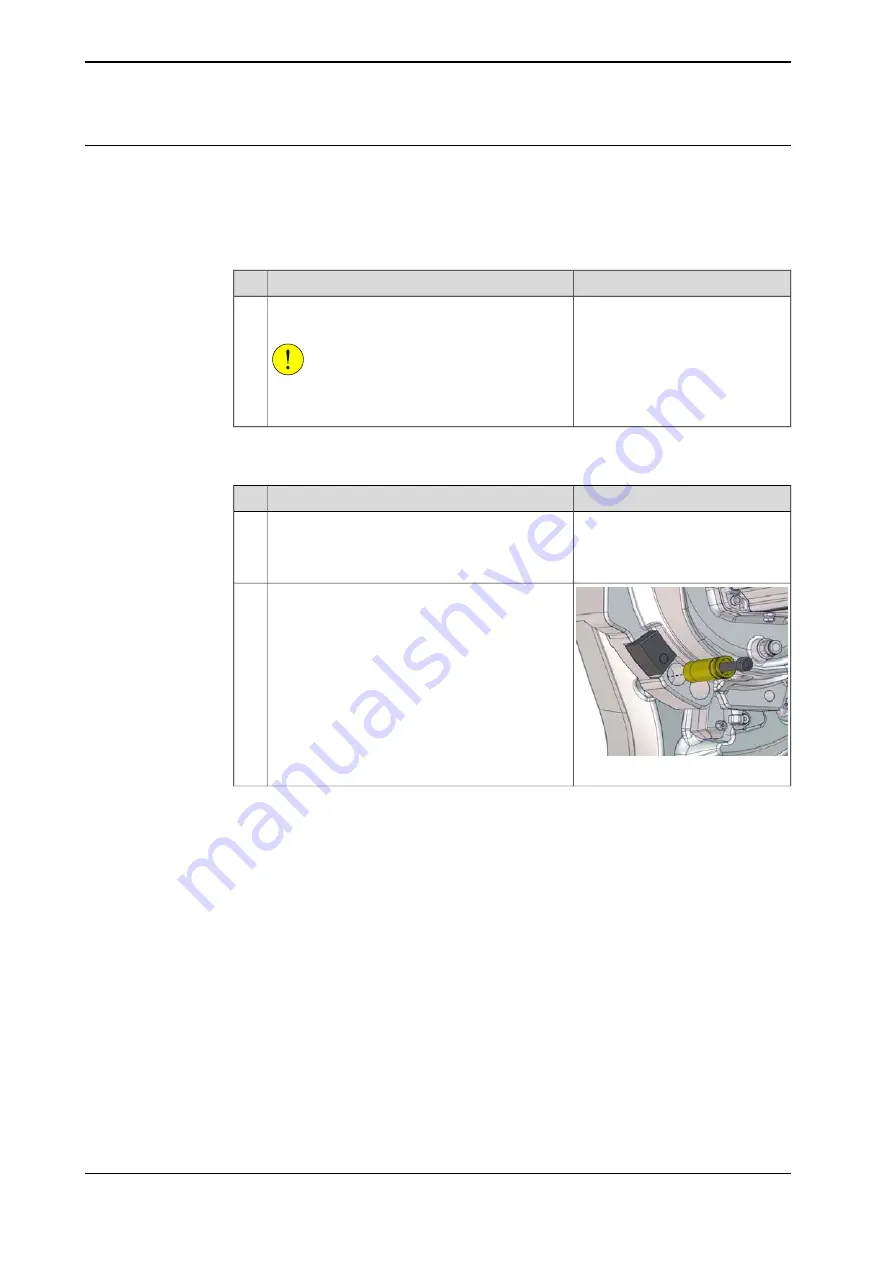
Jog axis 2 to -35°.
1
xx1700000270
Remove the transportation lock screw and the
yellow sleeve from the parking position.
2
Continues on next page
56
Product manual - IRB 6700Inv
3HAC058254-001 Revision: L
© Copyright 2017 - 2020 ABB. All rights reserved.
2 Installation and commissioning
2.3.2 Securing the robot arm position for lift, rotation and transportation
Continued
Summary of Contents for IRB 6700Inv
Page 1: ...ROBOTICS Product manual IRB 6700Inv ...
Page 16: ...This page is intentionally left blank ...
Page 40: ...This page is intentionally left blank ...
Page 182: ...This page is intentionally left blank ...
Page 672: ...This page is intentionally left blank ...
Page 704: ...This page is intentionally left blank ...
Page 720: ...This page is intentionally left blank ...
Page 722: ...This page is intentionally left blank ...
Page 729: ......







































































