





























Note
Action
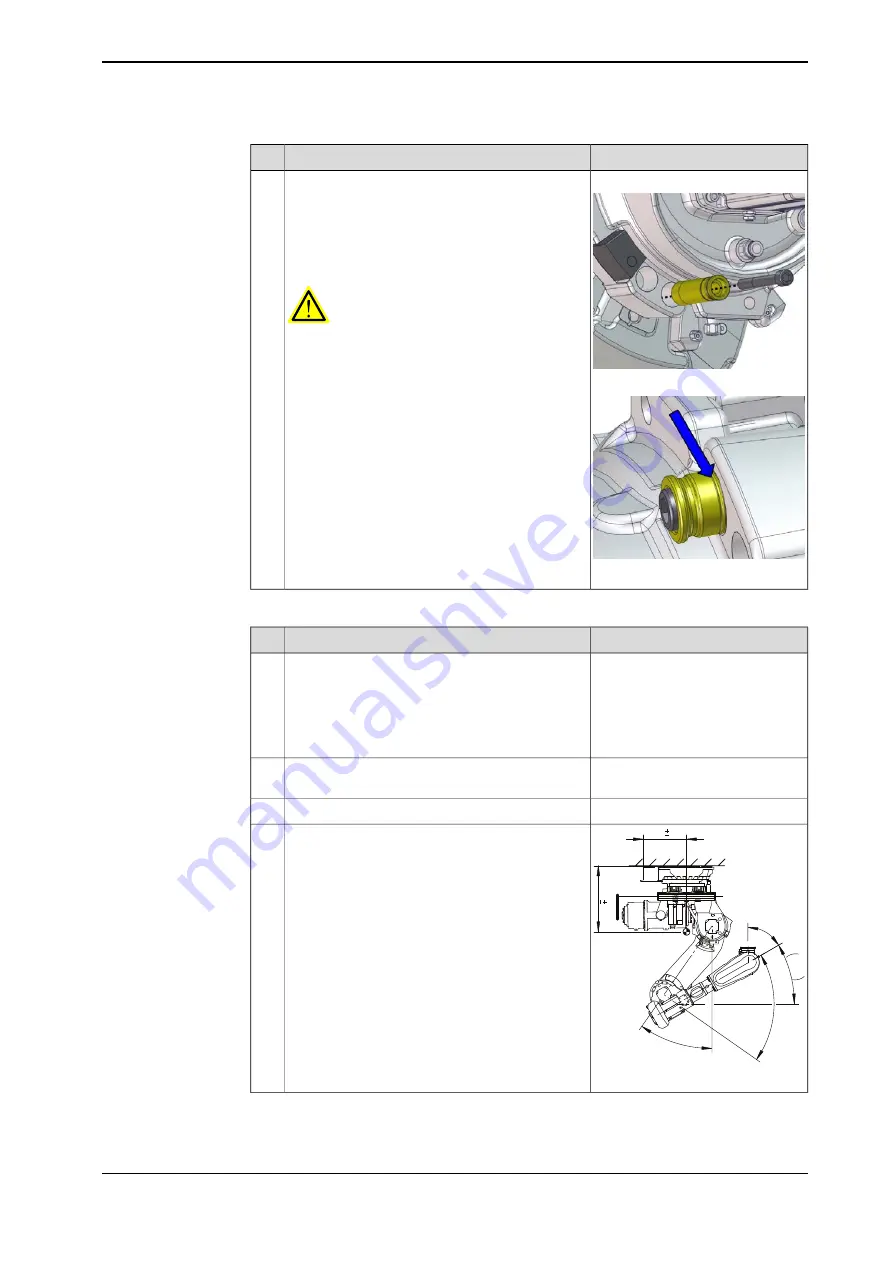
Tightening torque: 70 Nm ±15 Nm.
xx1700000269
Insert the yellow sleeve and the transportation
lock screw in the hole at the locking position.
Insert the sleeve all the way so that the marking
in the sleeve is aligned with the casting, see fig-
ure.
Tighten the screw.
DANGER
Always use the transportation lock screw and
sleeve to lock the lower arm at transportation,
turning and floor standing.
3
xx1600002114
Lifting down the robot from inverted position
Note
Action
Suitable screws, lightly lubricated:
If the robot is to be secured to the floor, prepare
an area where the robot can be secured with the
attachment bolts.
1
M24x100 (8 pcs)
For hole configuration, see
configuration, base on page 64
The robot must always be secured to the floor if
any kind of repair or maintenance work is to be
performed.
Verify that the lower arm is secured with the
transportation lock screw.
2
DressPack can stay fitted.
Remove any payload and tools from the robot.
3
870
50
600
50
60°
65°
35°
30°
xx1700000555
Jog the robot into position:
•
Axis 1: 0°
•
Axis 2: already in position and locked with
the transportation lock screw, do not jog!
•
Axis 3: +65°
•
Axis 4: 0°
•
Axis 5: +60°
•
Axis 6: no significance
4
Continues on next page
Product manual - IRB 6700Inv
561
3HAC058254-001 Revision: L
© Copyright 2017 - 2020 ABB. All rights reserved.
4 Repair
4.8.2 Replacing the axis-1 gearbox
Continued
Summary of Contents for IRB 6700Inv
Page 1: ...ROBOTICS Product manual IRB 6700Inv ...
Page 16: ...This page is intentionally left blank ...
Page 40: ...This page is intentionally left blank ...
Page 182: ...This page is intentionally left blank ...
Page 672: ...This page is intentionally left blank ...
Page 704: ...This page is intentionally left blank ...
Page 720: ...This page is intentionally left blank ...
Page 722: ...This page is intentionally left blank ...
Page 729: ......

































































