



























Note
Action
With all screws in position, lower the gearbox
carefully down against the base with guid-
ance from the guide pins.
3
Lower the lifting accessory so that the chain
is no longer stretched.
4
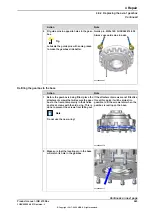
Attachment screws: M20x60 (12 pcs)
xx1400002172
Fit the attachment screws that secure the
gearbox to the base, from underneath.
5
Remove the guide pins and fit the two remain-
ing screws.
6
Tightening torque: 500 Nm.
Secure the attachment screws.
Tip
This procedure is best performed by two
persons working together:
•
one underneath the robot base making
sure that the bit is being fitted into the
screw head holes, all the way until they
reach the bottom
•
one using the torque wrench, tighten-
ing the screws from beside the base.
7
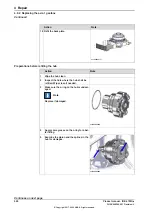
xx1700000568
Check the protection tube for damages.
Especially inspect the surface for the sealing
ring.
Replace if damaged.
8
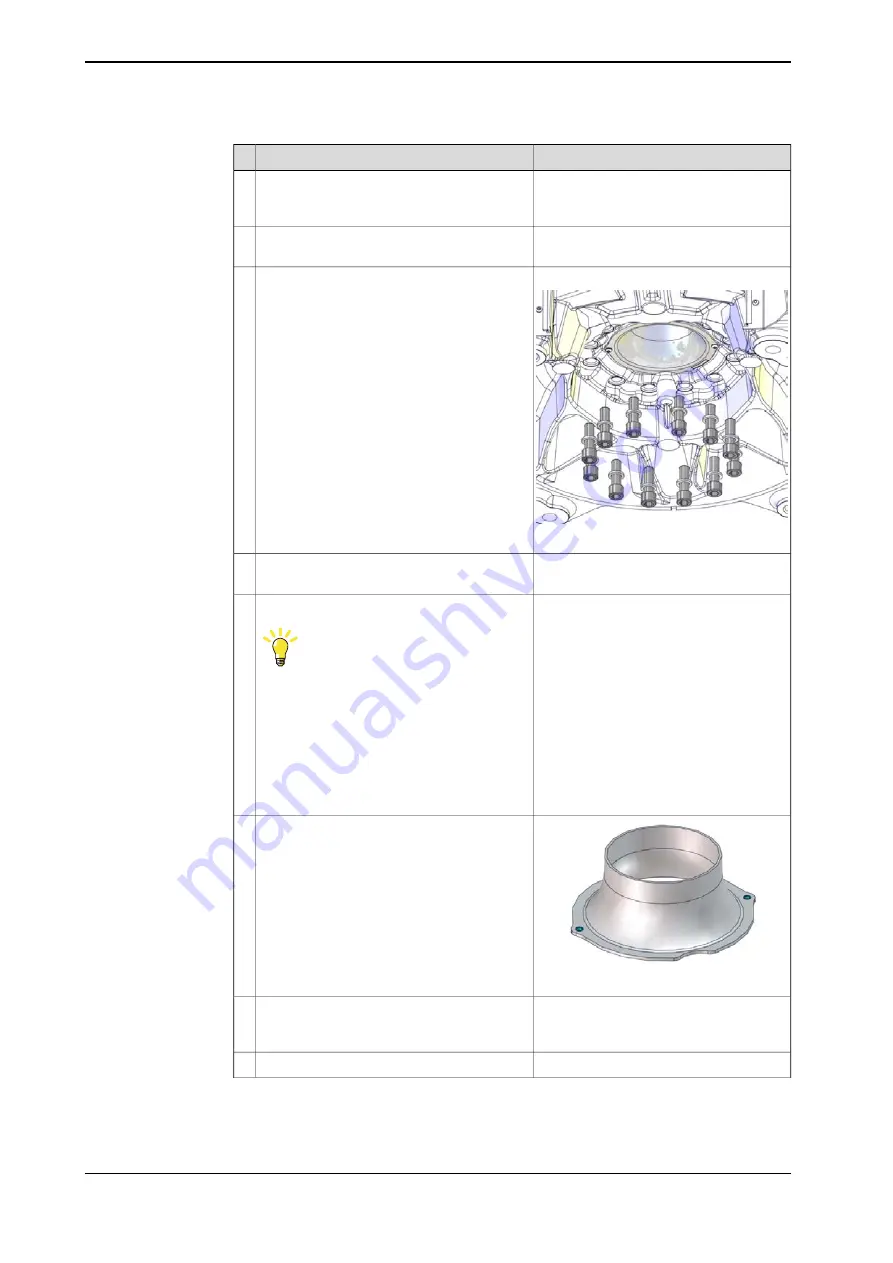
Wipe the surfaces of the protection tube and
the hole in axis-1 gearbox clean from any
contamination.
9
Put some grease on the protection tube.
10
Continues on next page
584
Product manual - IRB 6700Inv
3HAC058254-001 Revision: L
© Copyright 2017 - 2020 ABB. All rights reserved.
4 Repair
4.8.2 Replacing the axis-1 gearbox
Continued
Summary of Contents for IRB 6700Inv
Page 1: ...ROBOTICS Product manual IRB 6700Inv ...
Page 16: ...This page is intentionally left blank ...
Page 40: ...This page is intentionally left blank ...
Page 182: ...This page is intentionally left blank ...
Page 672: ...This page is intentionally left blank ...
Page 704: ...This page is intentionally left blank ...
Page 720: ...This page is intentionally left blank ...
Page 722: ...This page is intentionally left blank ...
Page 729: ......






































































