



























Note
Action
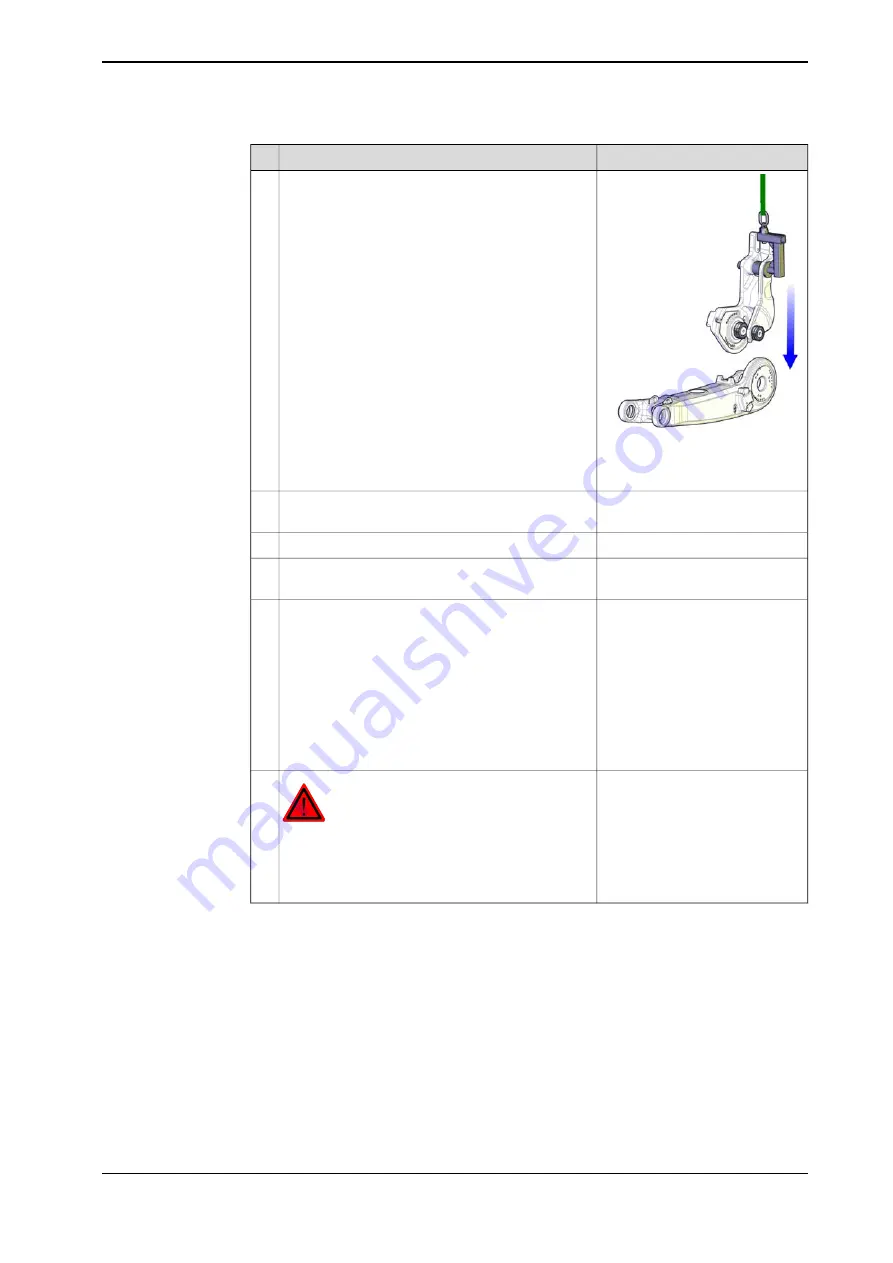
xx1000001379
Lift the parallel arm, lower it and put it in mounting
position with the lower arm.
11
Art. no. is specified in
.
Carefully press the parallel arm onto the lower arm
using the
pressing tool, lower arm
.
12
Fit the big and small VK cover.
13
Detailed in section
complete lower arm on page 261
Refit the complete lower arm.
14
Pendulum Calibration is described
in
Operating manual - Calibration
Pendulum
, enclosed with the cal-
ibration tools.
Recalibrate the robot.
15
Axis Calibration is described in
Calibrating with Axis Calibration
method on page 360
.
General calibration information is
included in section
.
DANGER
Make sure all safety requirements are met when
performing the first test run. These are further de-
tailed in the section
First test run may cause injury
16
Product manual - IRB 760
277
3HAC039838-001 Revision: M
© Copyright 2011-2018 ABB. All rights reserved.
4 Repair
4.4.9 Replacement of parallel arm
Continued
Summary of Contents for IRB 760 Series
Page 1: ...ROBOTICS Product manual IRB 760 ...
Page 8: ...This page is intentionally left blank ...
Page 46: ...This page is intentionally left blank ...
Page 96: ...This page is intentionally left blank ...
Page 144: ...This page is intentionally left blank ...
Page 394: ...This page is intentionally left blank ...
Page 400: ......
Page 401: ......






































































