




























2.3.2 Lifting robot with roundslings
General
The robot can be lifted with roundslings according to this section.
Sling specification
Length / Note
Lifting capacity
Qty
Sling type
0.460 m
4 000 kg
4 pcs
Chain sling with shortener
0.670 m (2 pcs)
0.790 m
1 m (2 pcs)
2 000 kg
5 pcs
Roundsling, robot
1.5 m
2 m (2 pcs)
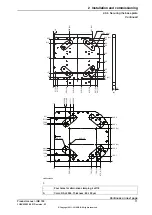
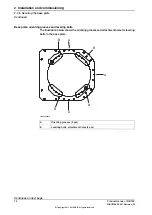
Lifting with roundslings
Note
Action
xx1000001093
Position robot in a secure transport position.
1
Attach roundslings to robot according to fig-
ure
2
CAUTION
The IRB 760 robot weighs 2300 kg.
All lifting accessories used must be sized
accordingly!
3
WARNING
Personnel must not, under any circum-
stances, be present under the suspended
load!
4
Continues on next page
62
Product manual - IRB 760
3HAC039838-001 Revision: M
© Copyright 2011-2018 ABB. All rights reserved.
2 Installation and commissioning
2.3.2 Lifting robot with roundslings
Summary of Contents for IRB 760 Series
Page 1: ...ROBOTICS Product manual IRB 760 ...
Page 8: ...This page is intentionally left blank ...
Page 46: ...This page is intentionally left blank ...
Page 96: ...This page is intentionally left blank ...
Page 144: ...This page is intentionally left blank ...
Page 394: ...This page is intentionally left blank ...
Page 400: ......
Page 401: ......







































































