

























Note
Action
DANGER
When releasing the holding brakes, the robot axes
may move very quickly and sometimes in unexpec-
ted ways.
Make sure no personnel is near or beneath the ro-
bot.
2
Release the holding brake on a particular robot
axis by pressing the corresponding button on the
internal brake release unit.
3
The brake will function again as soon as the button
is released.
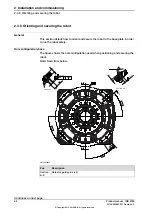
Supplying power to connector R1.MP
If the robot is not connected to the controller, power must be supplied to connector
R1.MP on the robot, in order to enable the brake release buttons.
Note
The IRB 8700 has two R1.MP connectors: R1.MP-A and R1.MP-B. See table how
to supply power to the connectors.
Note
Action
DANGER
Incorrect connections, such as supplying
power to the wrong pin, may cause all
brakes to be released simultaneously!
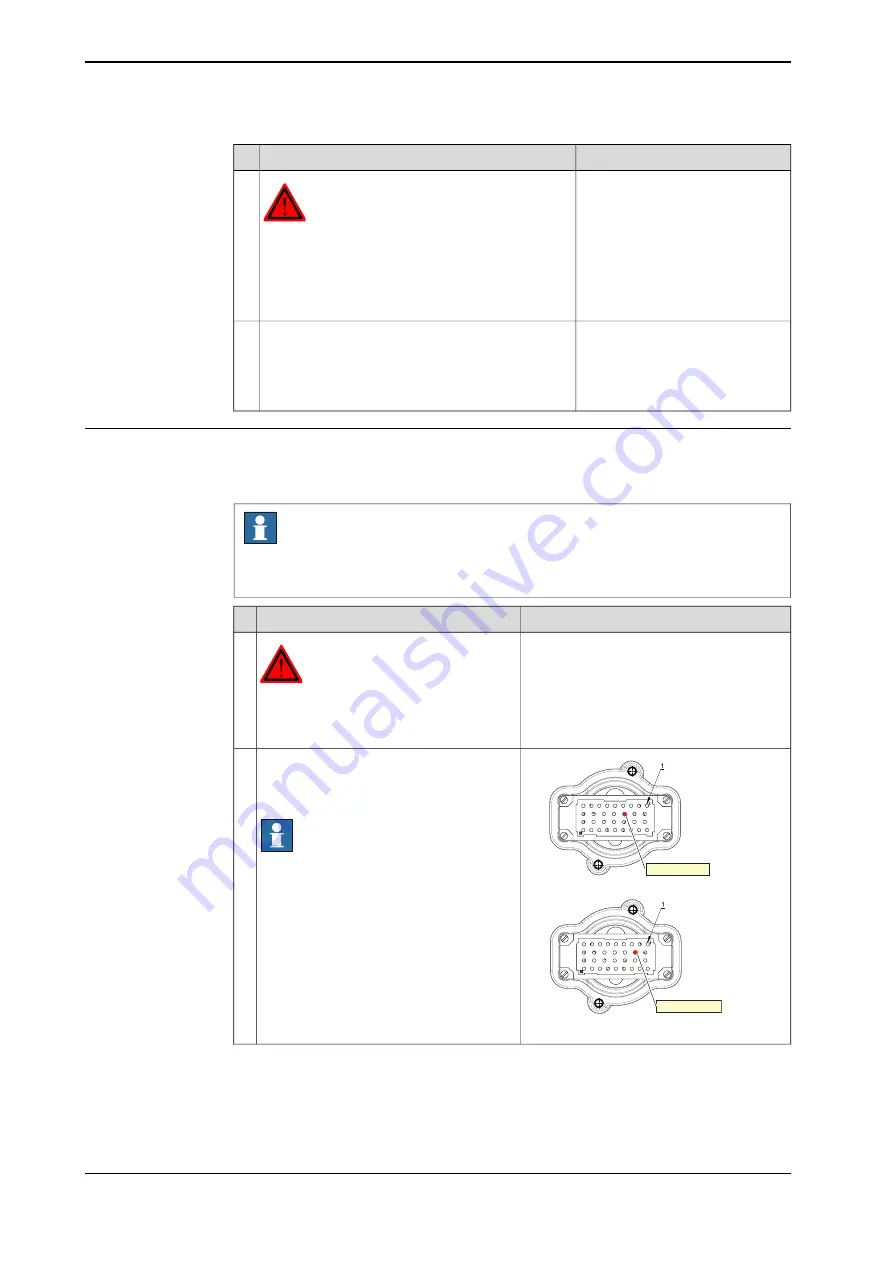
1
MP-A
MP-B
24V (pin 11 MP-B)
0V (pin 12 MP-A)
xx1500001989
Valid for axes-1, -2, and -3!
Supply 0V on pin 12 R1.MP-A.
Supply 24V on pin 11 R1.MP-B.
Note
Both R1.MP-A and R1.MP-B contacts are
used when relasing the brakes on axis-1,
-2, and -3.
2
Continues on next page
78
Product manual - IRB 8700
3HAC052853-001 Revision: F
© Copyright 2015-2018 ABB. All rights reserved.
2 Installation and commissioning
2.3.7 Manually releasing the brakes
Continued
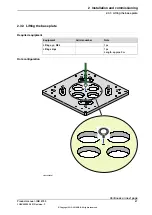
Summary of Contents for IRB 8700 Series
Page 1: ...ROBOTICS Product manual IRB 8700...
Page 16: ...This page is intentionally left blank...
Page 824: ...This page is intentionally left blank...
Page 838: ...This page is intentionally left blank...
Page 840: ...This page is intentionally left blank...
Page 846: ......
Page 847: ......







































































