





























Note
Action
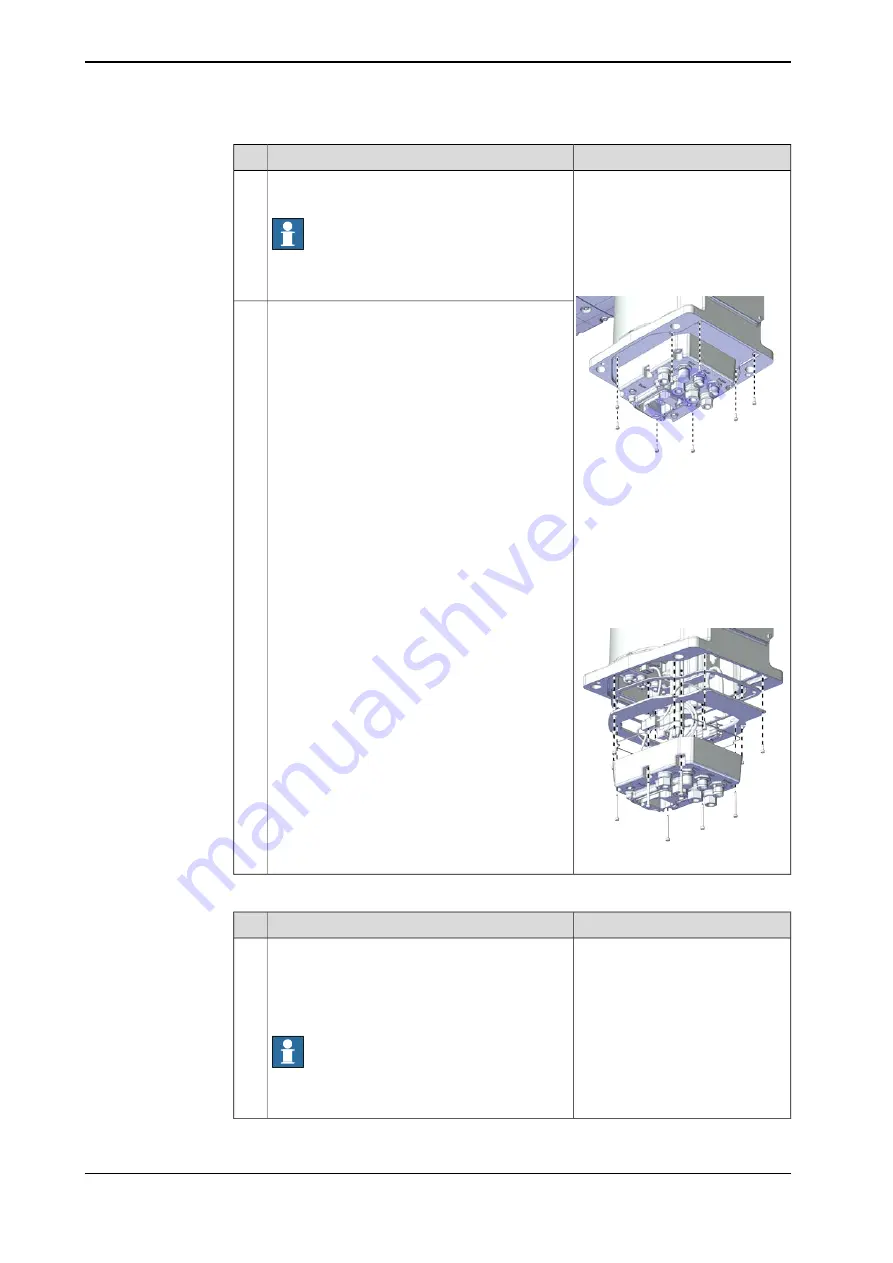
For undeneath outlet cable version:
For undeneath outlet cable version, refit the main
harness assembly to the base.
Note
Refit the bottom plate to the main harness if
needed.
5
For robots with protection class
IP30 (option 3350-300)
Screws: Hex socket head cap
screw M3x30 12.9 Lafre
2C2B/FC6.9 (8 pcs)
Tightening torque: 1.2 Nm ±10%
xx2100001204
Secure with the screws.
6
For robots with protection class
IP54 (option 3350-540)
For robots with protection type
Clean Room (option 3351-1)
Screws: Hex socket head cap
screw M3x30 12.9 Lafre
2C2B/FC6.9 (8 pcs)
Tightening torque: 1.2 Nm ±10%
xx2100002437
Refitting the base plate/ rear plate
Note
Action
For robots with protection type Clean Room:
1
Clean the joints that have been opened and wipe
the parts free from particles with spirit on a lint
free. See
Cut the paint or surface on the robot
before replacing parts on page 118
Note
After all repair work, wipe the Clean Room robot
free from particles with spirit on a lint free cloth.
Continues on next page
752
Product manual - IRB 920
3HAC075721-001 Revision: C
© Copyright 2022 ABB. All rights reserved.
5 Repair
5.7.1 Replacing the axis-1 motor sub-assembly
Continued
Summary of Contents for IRB 920
Page 1: ...ROBOTICS Product manual IRB 920 ...
Page 8: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 50: ...This page is intentionally left blank ...
Page 110: ...This page is intentionally left blank ...
Page 984: ...This page is intentionally left blank ...
Page 1000: ...This page is intentionally left blank ...
Page 1002: ...This page is intentionally left blank ...
Page 1006: ......
Page 1007: ......





































































