





























7.4 Manipulator collapses on power down
Description
The manipulator is able to work correctly while Motors ON is active, but when
Motors OFF is active, one or more axes drops or collapses under its own weight.
The holding brakes (normally one in each motor), is not able to hold the weight of
the manipulator arm.
Consequences
For a heavy robot, the collapse can cause severe injury to personnel working in
the area or severe damage to the robot and/or surrounding equipment.
For a small robot, the collapse can cause injury to personnel working close to the
robot or damage to the robot and/or surrounding equipment.
Possible causes
The symptom can be caused by:
•
Faulty brake.
•
Faulty power supply to the brake.
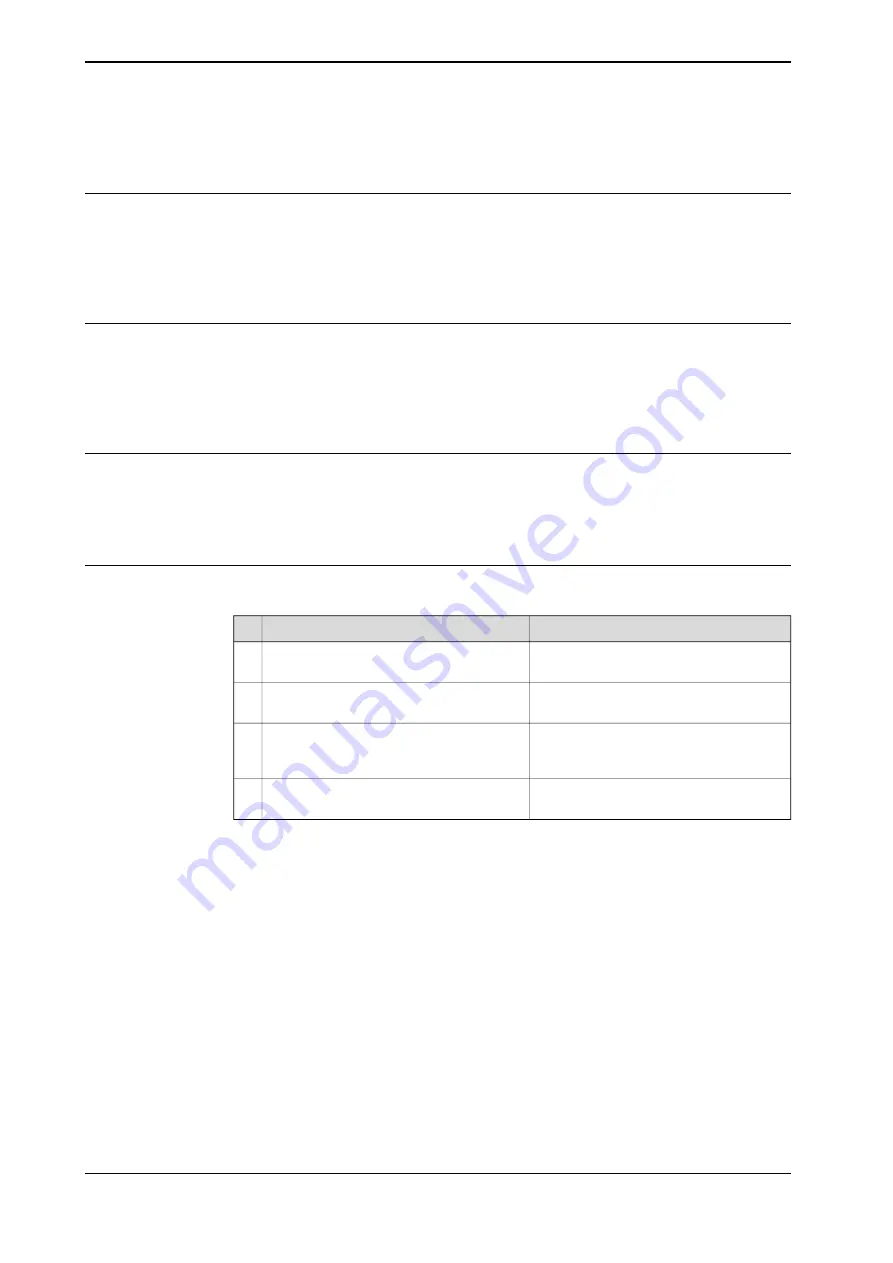
Recommended actions
The following actions are recommended:
Information
Action
Determine which motor(s) causes the robot
to collapse.
1
See the circuit diagram.
Check the brake power supply to the col-
lapsing motor during the Motors OFF state.
2
If found faulty, the motor must be replaced
as a complete unit.
Remove the resolver or resolver cover of
the motor to see if there are any signs of
oil leaks.
3
If found faulty, the motor must be replaced
as a complete unit.
Remove the motor from the gearbox to in-
spect it from the drive side.
4
982
Product manual - IRB 920
3HAC075721-001 Revision: C
© Copyright 2022 ABB. All rights reserved.
7 Troubleshooting
7.4 Manipulator collapses on power down
Summary of Contents for IRB 920
Page 1: ...ROBOTICS Product manual IRB 920 ...
Page 8: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 50: ...This page is intentionally left blank ...
Page 110: ...This page is intentionally left blank ...
Page 984: ...This page is intentionally left blank ...
Page 1000: ...This page is intentionally left blank ...
Page 1002: ...This page is intentionally left blank ...
Page 1006: ......
Page 1007: ......







































































