





























5.6.4 Replacing the pulley on the ball screw lower position
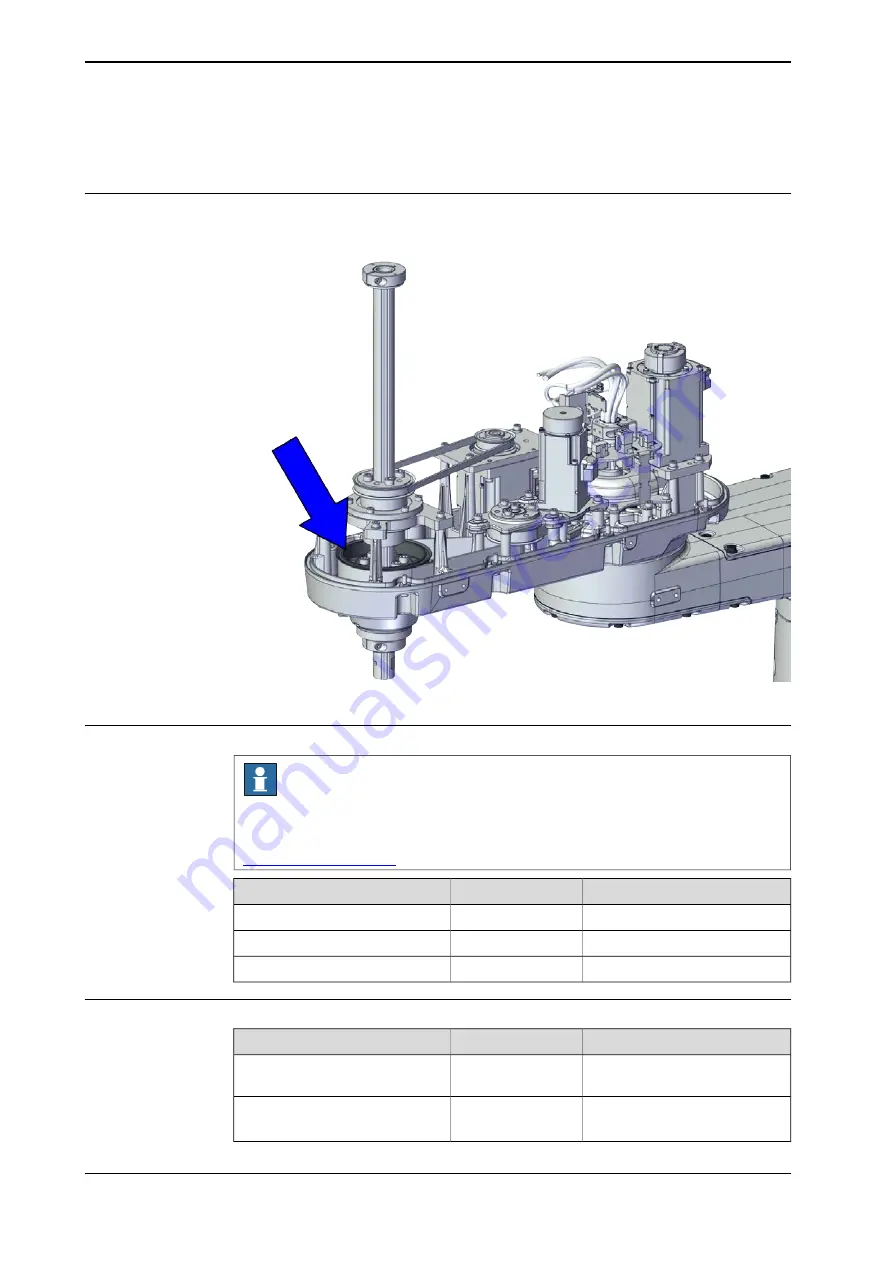
Location of the pulley
The pulley is located as shown in the figure.
xx2100001017
Required spare parts
Note
The spare part numbers that are listed in the table can be out of date. See the
latest spare parts of the IRB 920 via myABB Business Portal,
.
Note
Article number
Spare part
3HAC070481-001
Ax4-2 pulley Z2, 2020A
With bolt
3HAC073069-001
Mechanical-Stop bottom, D20
3HAC076611-001
Outer arm cover
Required tools and equipment
Note
Article number
Equipment
Content is defined in section
.
-
Standard toolkit
Used to install the ball screw nut.
Special tool for L2
3HAC077249-001
IRB 920 special tool
Continues on next page
454
Product manual - IRB 920
3HAC075721-001 Revision: C
© Copyright 2022 ABB. All rights reserved.
5 Repair
5.6.4 Replacing the pulley on the ball screw lower position
Summary of Contents for IRB 920
Page 1: ...ROBOTICS Product manual IRB 920 ...
Page 8: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 50: ...This page is intentionally left blank ...
Page 110: ...This page is intentionally left blank ...
Page 984: ...This page is intentionally left blank ...
Page 1000: ...This page is intentionally left blank ...
Page 1002: ...This page is intentionally left blank ...
Page 1006: ......
Page 1007: ......







































































