



























3.2.2 Risk of tipping/stability
Risk of tipping
If the robot is not fastened to the foundation while moving the arm, the robot is not
stable in the whole working area. Moving the arm will displace the center of gravity,
which may cause the robot to tip over.
The shipping position is the most stable position.
Do not
change the robot position before securing it to the foundation!
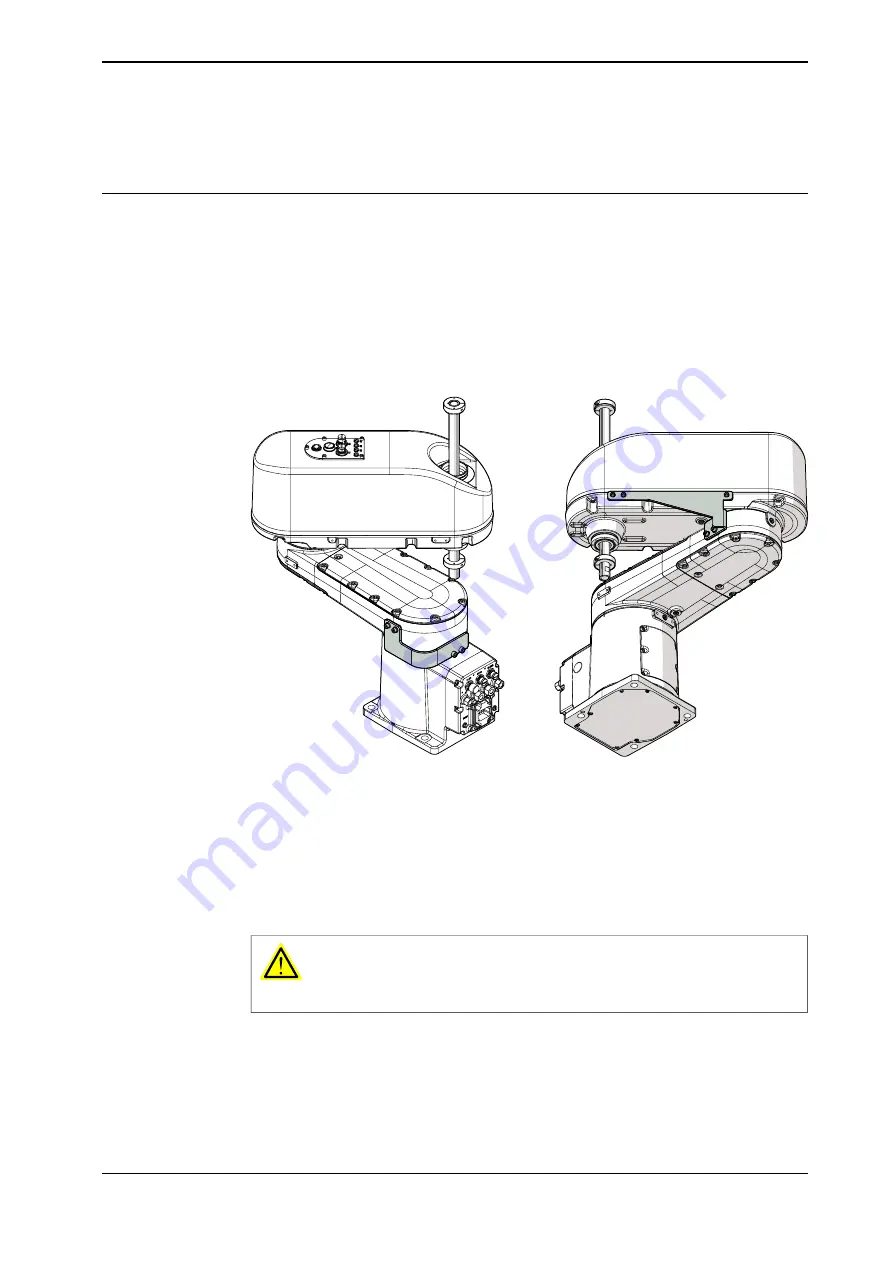
Shipping and transportation position
This figure shows the robot in its shipping position and transportation position.
xx2000001152
Transportation bracket
At delivery, the robot is locked in the correct position with a transportation bracket
for securing the position during shipping and transport. The bracket must be
removed before conducting any service work.
How to use the transportation bracket is described further in
WARNING
The robot is likely to be mechanically unstable if not secured to the foundation.
Product manual - IRB 920
53
3HAC075721-001 Revision: C
© Copyright 2022 ABB. All rights reserved.
3 Installation and commissioning
3.2.2 Risk of tipping/stability
Summary of Contents for IRB 920
Page 1: ...ROBOTICS Product manual IRB 920 ...
Page 8: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 50: ...This page is intentionally left blank ...
Page 110: ...This page is intentionally left blank ...
Page 984: ...This page is intentionally left blank ...
Page 1000: ...This page is intentionally left blank ...
Page 1002: ...This page is intentionally left blank ...
Page 1006: ......
Page 1007: ......






































































