





























4 Repair
4.3.3 Dismantling the lower arm
82
3HAC026320-001 Revision: A
4.3.3 Dismantling the lower arm
General
See foldouts 1 in chapter, Foldout.
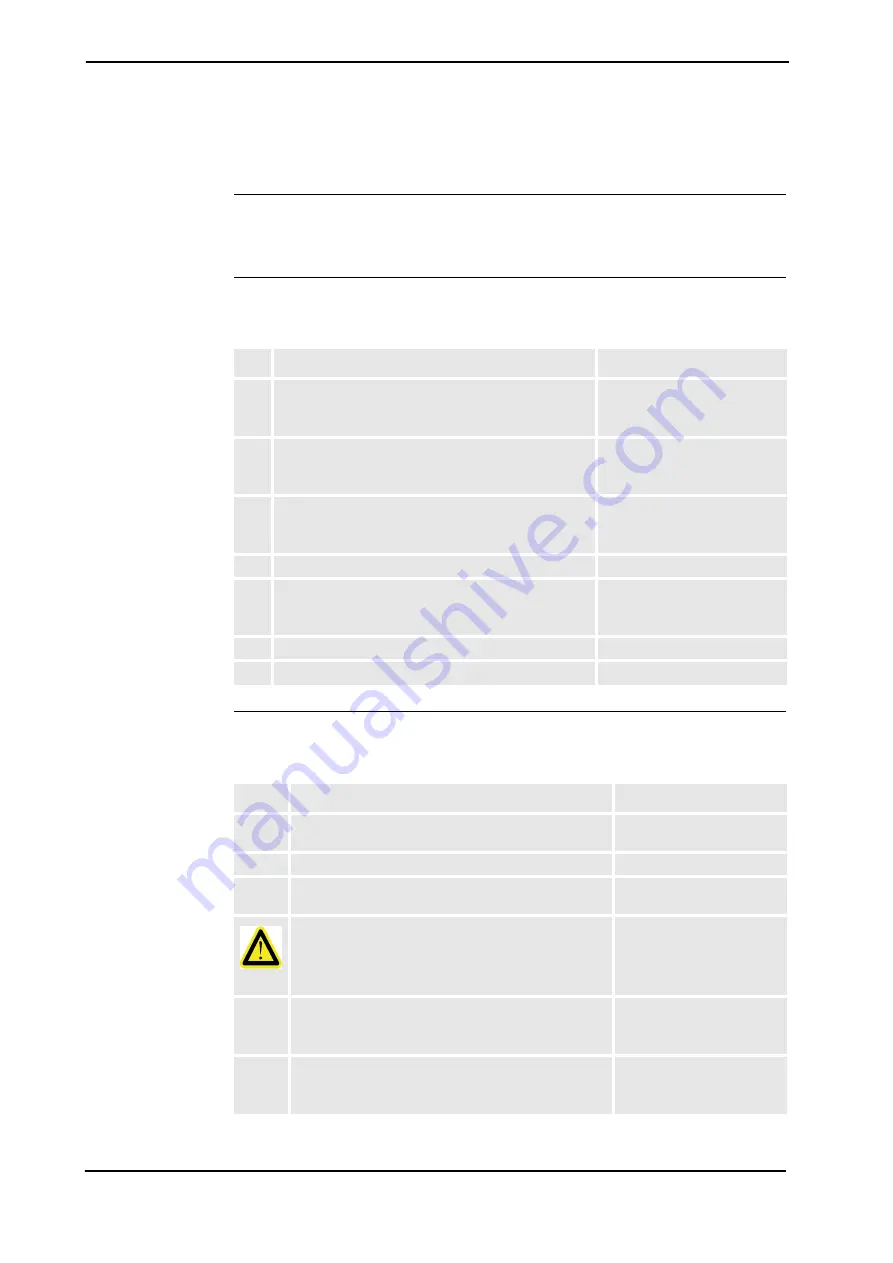
To dismantle
To assemble
Action
Note/Illustration
1.
Remove the balancing springs.
Described in section:
Dismantling the balancing
springs on page 85
.
1.
Remove the cabling down to axis 1.
Described in section:
Cabling and serial measuring
board on page 102
1.
Dismantle the upper arm.
Described in section:
Dismantling the complete
upper arm on page 92
.
1.
Attach a hoist with lifting slings to the lower arm.
1.
Remove the parallel arm in accordance with.
Described in section:
Dismantling the parallel arm
on page 89
.
1.
Loosen screws.
See foldout/pos. <1/13>
1.
Remove the lower arm.
Action
Note/Illustration
1.
Transfer the damping element and calibration mark-
ing to the new lower arm.
2.
Lift the lower arm into position.
3.
Fix the lower arm to gear 2 using screws <1/13> and
tighten them to a torque of 68 Nm ±10%.
WARNING!
To prevent clicking during operation of the robot,
grease the bearing seating of the parallel arm in
the lower arm.
4.
Replace the parallel arm.
Detailed in section:
Dismantling the parallel arm
on page 89
.
5.
Replace the upper arm.
Detailed in section:
Dismantling the complete
upper arm on page 92
.
Summary of Contents for IRB1410
Page 1: ...Product manual Articulated robot IRB1410 M2004 ...
Page 2: ......
Page 3: ...Product manual IRB 1410 M2004 ID 3HAC026320 001 Revision A ...
Page 8: ...Table of Contents 6 ...
Page 114: ...4 Repair 4 8 1 General 112 3HAC026320 001 Revision A ...
Page 124: ......
Page 136: ......
Page 138: ...7 Recommended Spare parts 7 0 1 Spare parts 136 Revision A 3HAC026320 001 ...
Page 140: ...8 Foldouts 8 0 1 Introduction 138 3HAC026320 001 Revision A ...
Page 141: ......
Page 142: ......
Page 143: ......
Page 144: ......
Page 145: ......
Page 146: ......
Page 147: ......
Page 148: ......
Page 149: ......
Page 150: ......
Page 164: ...Index 152 3HAC026320 001 ...
Page 165: ......







































































