





























2 Installation and commissioning
2.1.7 Restricting the Working Space
3HAC026320-001 Revision: A
45
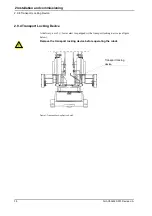
2.1.7 Restricting the Working Space
When installing the manipulator, make sure that it can move freely within its entire working
range. If there is a risk that it may collide with other objects, its working range should be lim-
ited, both mechanically and using parameters. Installation of an optional extra stop for the
main axes 1, 2 and 3 is described below.
Limiting the working range using parameters is described in the section: Configuring systems
in the Operating manual - IRC5 with FlexPendant.
Axis 1
The range of rotation for axis 1 can be limited mechanically by fitting extra stop lugs to the
base, see Figure 8.
Instructions for necessary machining and mounting are supplied with the kit.
NB! The original stop lug must never be removed.
Figure 8: Mechanically limiting Axis 1.
Axis 2
The working range of axis 2 can be limited mechanically by fitting extra stop lugs to the under
arm (see Figure 9). The lugs limit the arm movements in intervals of 20°. (20° = 1 lug, 40° =
2 lugs, etc.)
Instructions for doing this are supplied with the kit.
Extra stop lug for axis 1
Summary of Contents for IRB1410
Page 1: ...Product manual Articulated robot IRB1410 M2004 ...
Page 2: ......
Page 3: ...Product manual IRB 1410 M2004 ID 3HAC026320 001 Revision A ...
Page 8: ...Table of Contents 6 ...
Page 114: ...4 Repair 4 8 1 General 112 3HAC026320 001 Revision A ...
Page 124: ......
Page 136: ......
Page 138: ...7 Recommended Spare parts 7 0 1 Spare parts 136 Revision A 3HAC026320 001 ...
Page 140: ...8 Foldouts 8 0 1 Introduction 138 3HAC026320 001 Revision A ...
Page 141: ......
Page 142: ......
Page 143: ......
Page 144: ......
Page 145: ......
Page 146: ......
Page 147: ......
Page 148: ......
Page 149: ......
Page 150: ......
Page 164: ...Index 152 3HAC026320 001 ...
Page 165: ......

































































