




























2 Installation and commissioning
2.1.8 Mounting Holes for Equipment on the Manipulator
48
3HAC026320-001 Revision: A
2.1.8 Mounting Holes for Equipment on the Manipulator
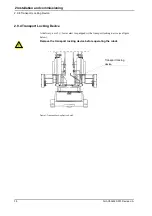
NB! Never drill a hole in the manipulator without first consulting ABB.
Figure 11: Mounting Holes for Customer Equipment.
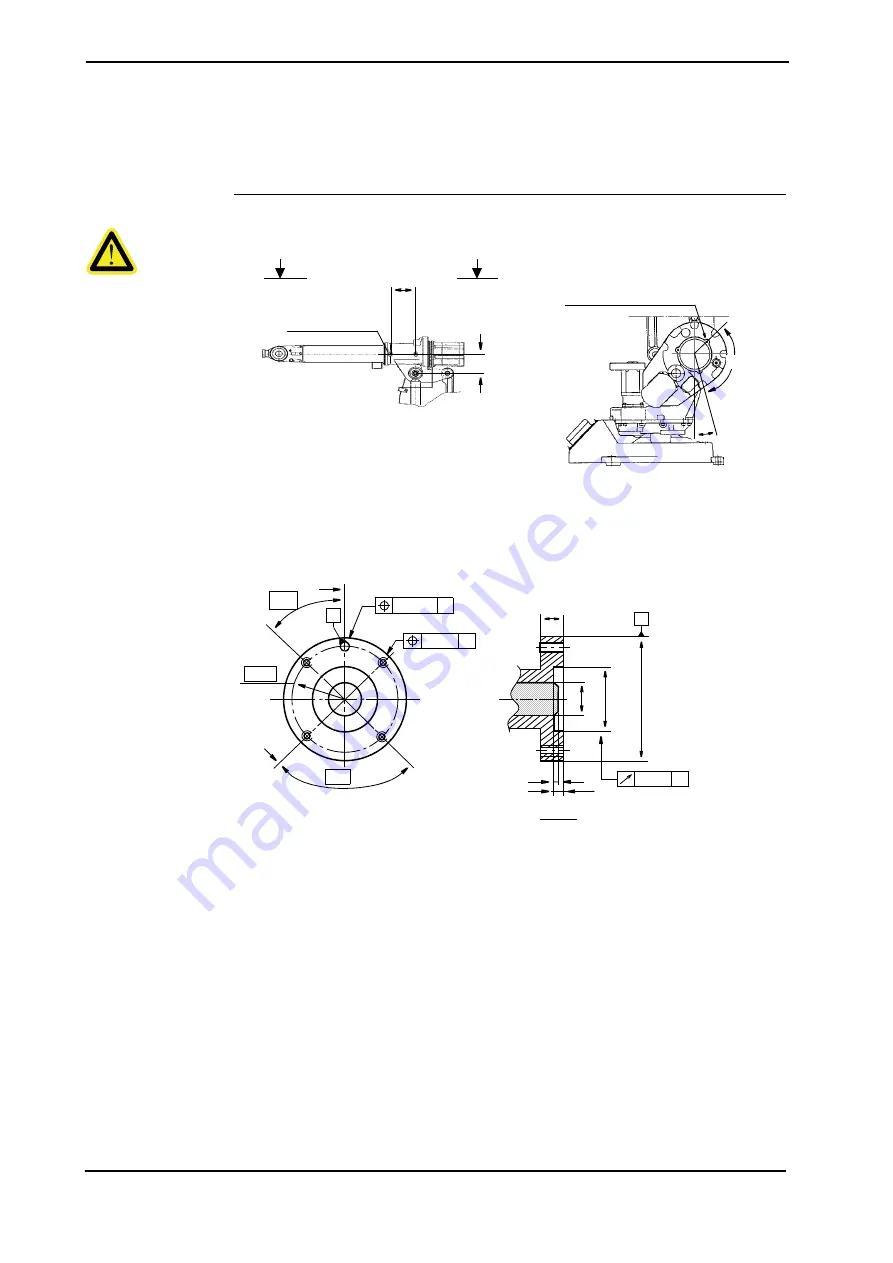
Figure 12: The mechanical Interface (Mounting Flange).
135
Mounting holes
for equipment
M8 (2x)
Depth 16
120
A
A
Mounting holes
for equipment, both sides
M8 (3x), R=75
Depth 16
15
o
120
o
(3x)
IRB 1400
D=
2
5
D=
5
0
H8
h8
45
o
D=6 H7
M6 (4x)
R 20
A
A
4
10
A - A
2
∅
0.05
∅
0.3
B
C
B
0.06 B
(4x)
90
o
C
D=
1
2
Summary of Contents for IRB1410
Page 1: ...Product manual Articulated robot IRB1410 M2004 ...
Page 2: ......
Page 3: ...Product manual IRB 1410 M2004 ID 3HAC026320 001 Revision A ...
Page 8: ...Table of Contents 6 ...
Page 114: ...4 Repair 4 8 1 General 112 3HAC026320 001 Revision A ...
Page 124: ......
Page 136: ......
Page 138: ...7 Recommended Spare parts 7 0 1 Spare parts 136 Revision A 3HAC026320 001 ...
Page 140: ...8 Foldouts 8 0 1 Introduction 138 3HAC026320 001 Revision A ...
Page 141: ......
Page 142: ......
Page 143: ......
Page 144: ......
Page 145: ......
Page 146: ......
Page 147: ......
Page 148: ......
Page 149: ......
Page 150: ......
Page 164: ...Index 152 3HAC026320 001 ...
Page 165: ......
































































