





























4 Repair
4.3.1 Changing the motor of axis 2
3HAC026320-001 Revision: A
79
4.3: Axis 2
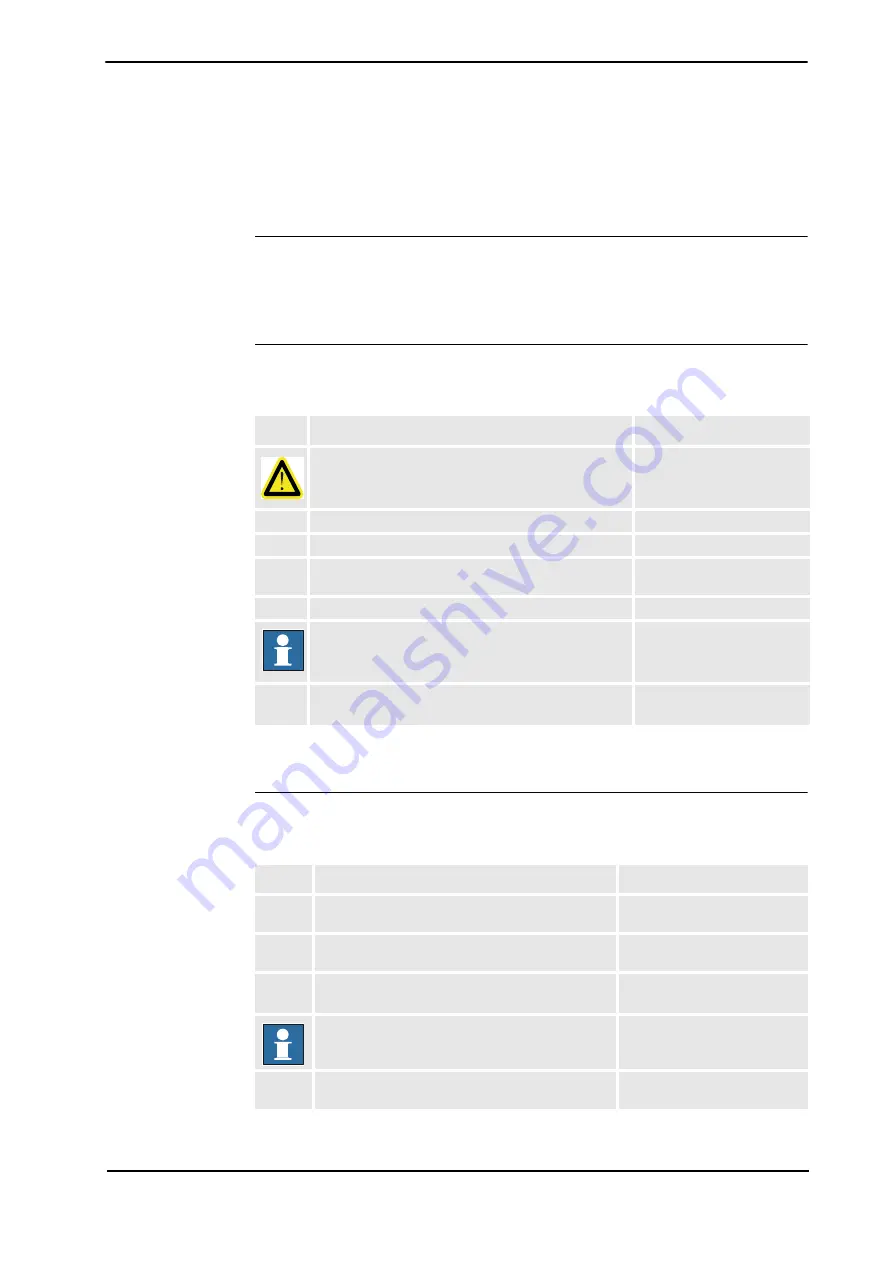
4.3.1 Changing the motor of axis 2
General
See foldouts 1 and 5 in chapter, Foldout.
The motor and the drive gear constitute one unit.
To dismantle
To assemble
Action
Note/Illustration
WARNING!
Lock the arm system before dismantling the
motor; the brake is located in the motor.
3.
Remove the cover of the motor.
4.
Loosen connectors R3.MP2 and R3.FB2.
5.
Remove the connection box by unscrewing the
screws.
See foldout/pos. <5/160>
6.
Note the position of the motor before removing it.
NOTE!
The oil will start to run out when loosen the
motor.
7.
Loosen the motor by unscrewing the motor screws.
See foldout/pos. <1/10>
Action
Note/Illustration
1.
Check that the assembly surfaces are clean and
the motor unscratched.
2.
Release the brake, apply 24 V DC to terminals 7
and 8 on the R3.MP2 connector.
3.
Install the motor, tighten screws.
See foldout/pos. <1/10>
Torque, approximately 2 Nm.
NOTE!
Note the position of the motor!
4.
Adjust the motor in relation to the drive in the gear-
box.
Summary of Contents for IRB1410
Page 1: ...Product manual Articulated robot IRB1410 M2004 ...
Page 2: ......
Page 3: ...Product manual IRB 1410 M2004 ID 3HAC026320 001 Revision A ...
Page 8: ...Table of Contents 6 ...
Page 114: ...4 Repair 4 8 1 General 112 3HAC026320 001 Revision A ...
Page 124: ......
Page 136: ......
Page 138: ...7 Recommended Spare parts 7 0 1 Spare parts 136 Revision A 3HAC026320 001 ...
Page 140: ...8 Foldouts 8 0 1 Introduction 138 3HAC026320 001 Revision A ...
Page 141: ......
Page 142: ......
Page 143: ......
Page 144: ......
Page 145: ......
Page 146: ......
Page 147: ......
Page 148: ......
Page 149: ......
Page 150: ......
Page 164: ...Index 152 3HAC026320 001 ...
Page 165: ......







































































